Hi folks,
I am setting up rover robot with ArduRover and Pixhawk radiolink (running ArduRover 4.0) - remote control over ethernet cable (so no RC radio). Everything works fine except the gimbal control.
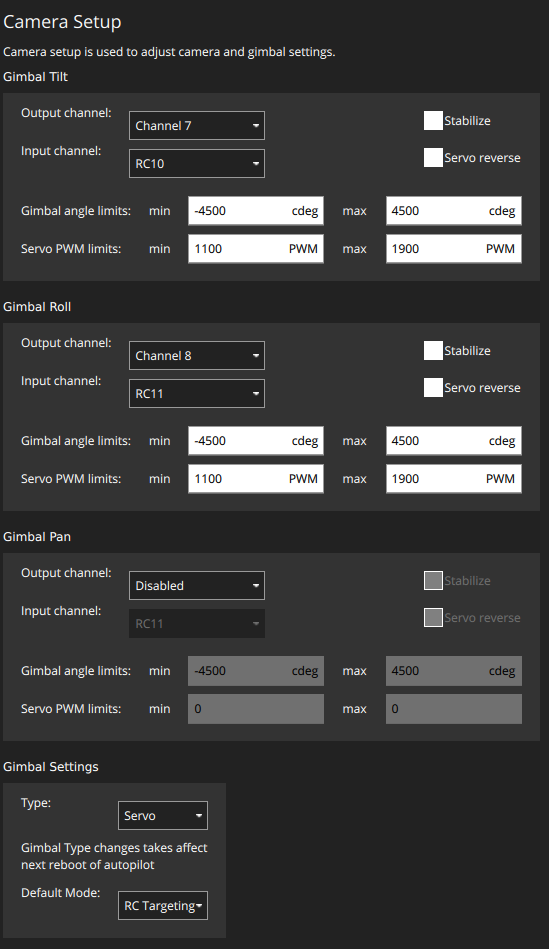
I have managed to make the gimbal’s “stabilize” feature get to work (so the servos are connected properly). But I can’t control the camera bimgail with joystick 
I belive my camera setup should be properly configure, but I am not sure I selected “default mode” properly… BUT I tried all of them, so that should not be the problem
Joystick is standard F310 joystick
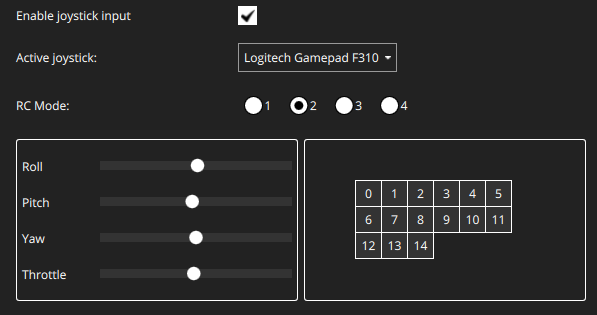
I tried to configure Gimbal Up/Down/Left/Right but when I press these buttons there is no reaction

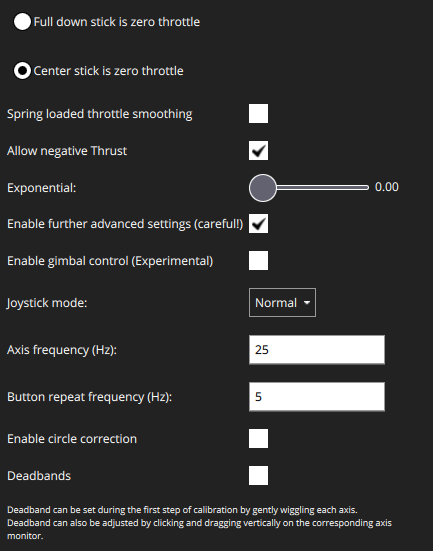
I also tried the “Enable gimal control” but it did not changed anything
Is there something I am missing in making this work?
Thanks for any reply
John