I have been working on getting a ardurover to follow a mission for a little while now, with no luck. Here is what has happened…
First, the robot wasn’t even moving when in auto mode | fixed by changing servo1_function to throttleLeft and servo3_function to throttleRight.
Second, the robot would spin uncontrollably in auto mode | fixed by leaving it for 2 weeks then coming back to it and using these instructions to edit my config.
Third, the robot would spin slower, and more controlled, but wouldn’t go straight in auto mode | fixed by un-reversing Servo1.
Fourth, the robot would go straight, in a semi-random line. Would get onto a line type of thing, but not the mission line | unfixed.
Fifth, robot goes somewhere random in rtl mode | also unfixed.
In addition to the things above I used the official rover documentation to get basic configuration.
Those seem to be the main problems at the moment. The GPS seems to be fine, the compass looks like it is oriented in the correct position (I have calibrated it quite a bit thinking it was that, no luck).
Potential causes:
- GPS module is not working properly
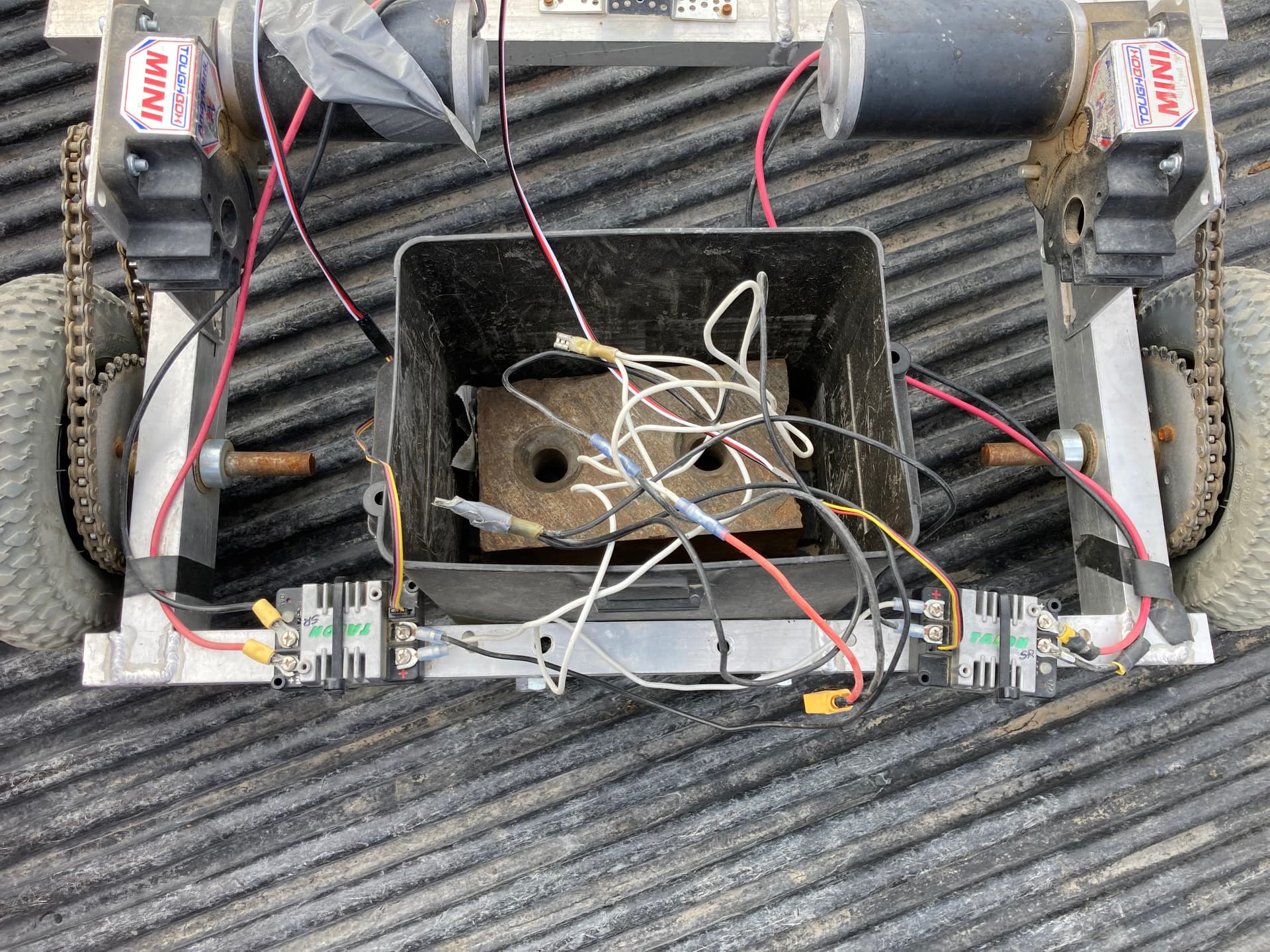
- Robot has four wheels, only back two drive it
- Something to do with PID settings
- Configuration is wrong
- Aliens…
This is the robot setup:
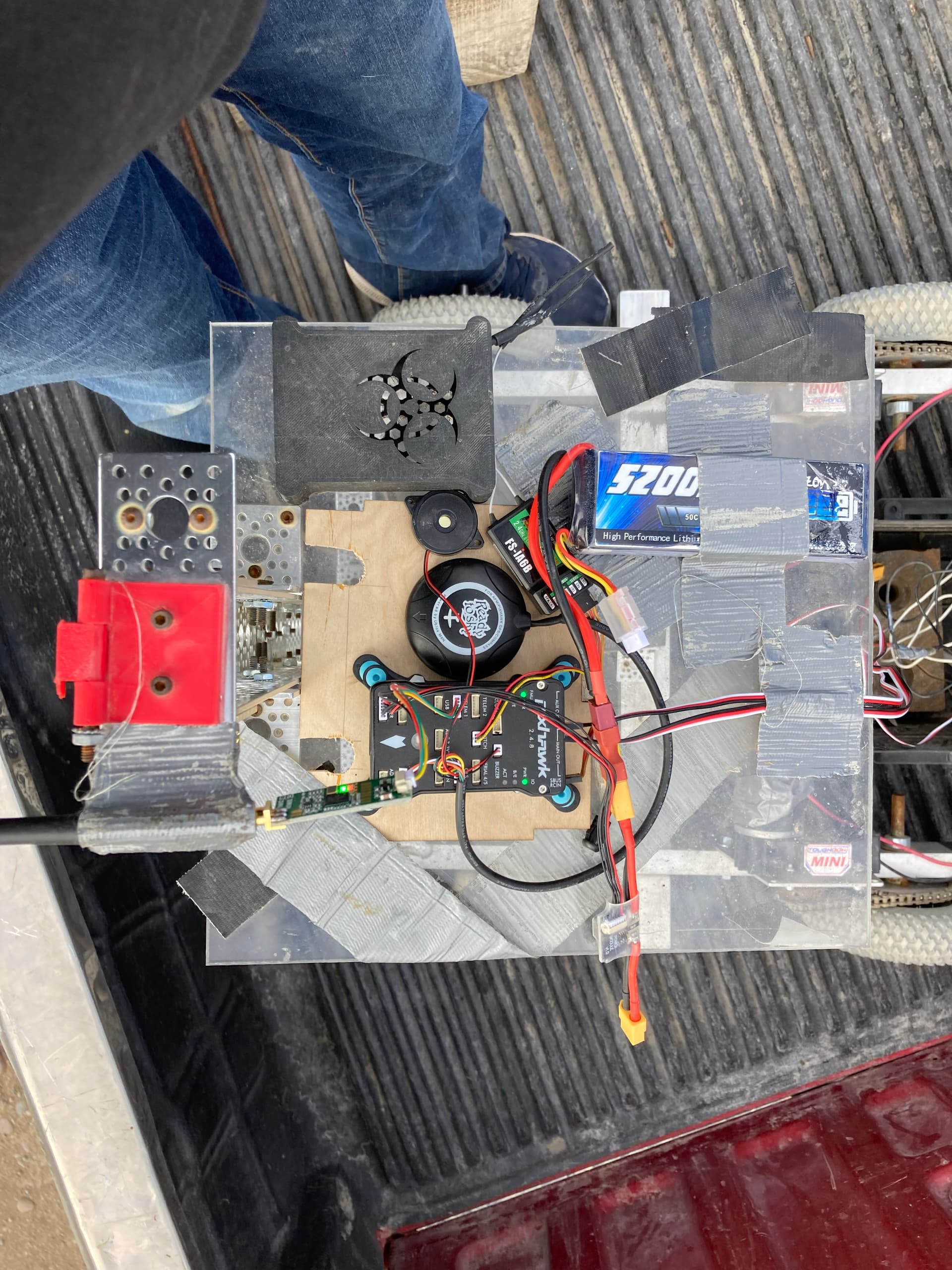
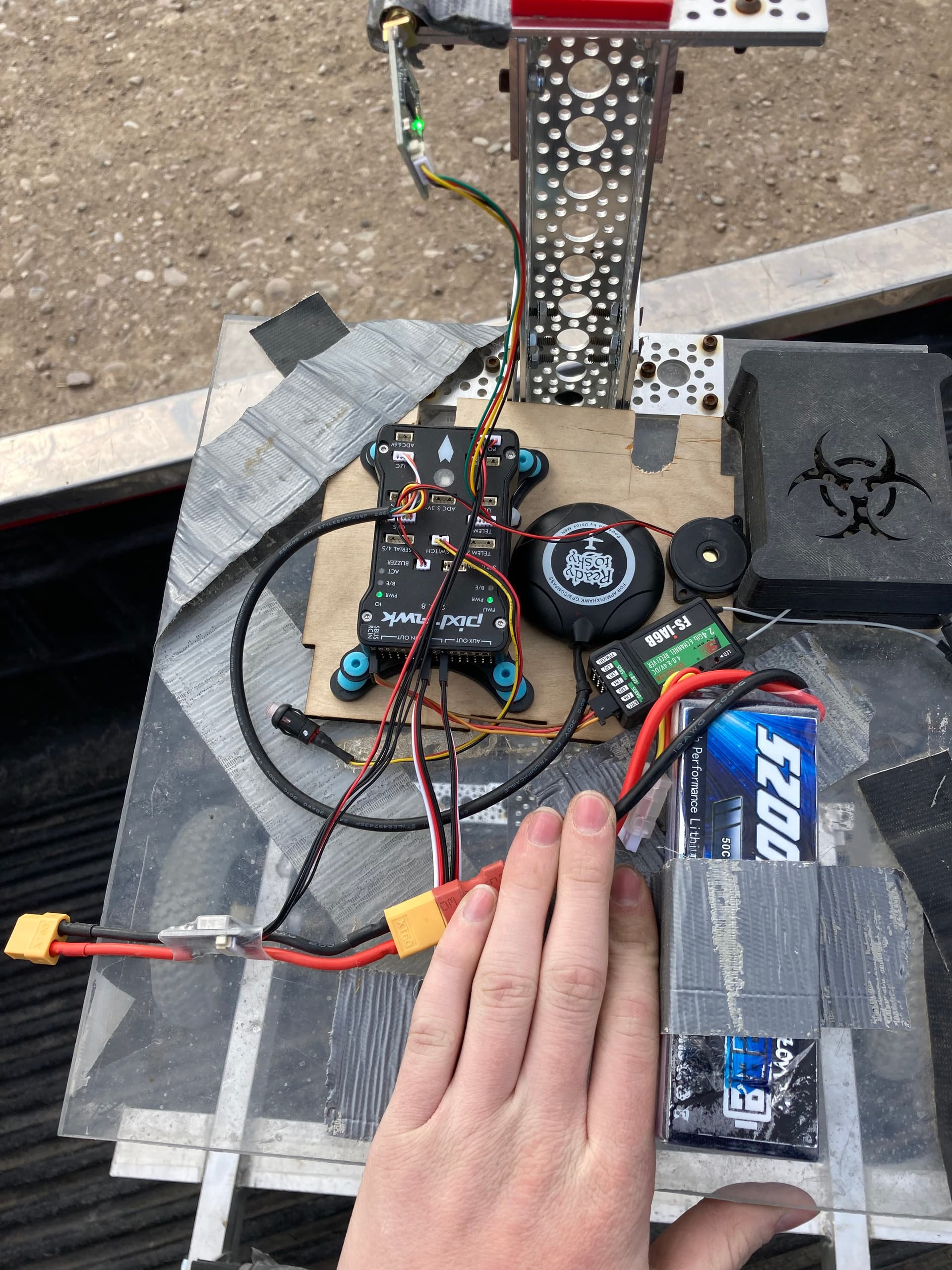
I can answer any questions!
OS: Ubuntu 20.04
QGroundControl Version: ![]()
Rover Firmware: 4.0
GPS Module: readytosky
Pixhawk Model: 2.4.8
Motor Controller: Talon SR
Config File: config.txt (25.5 KB)
Mission:
