Last time I tried the follow-me function I couldn’t get it to work. Can someone help me through all necessary steps to make the boat follow my kayak? I gave both Mission Planner and QGC on my phone all necessary permissions regarding location, data usage etc.
I think i read that I have to put the boat into Loiter-mode, but then what?
I found this quote on the forum but couldn’t locate the checkbox:
Goto the planner setting screen and down the bottom there is a testing screen checkbox. This is control-f
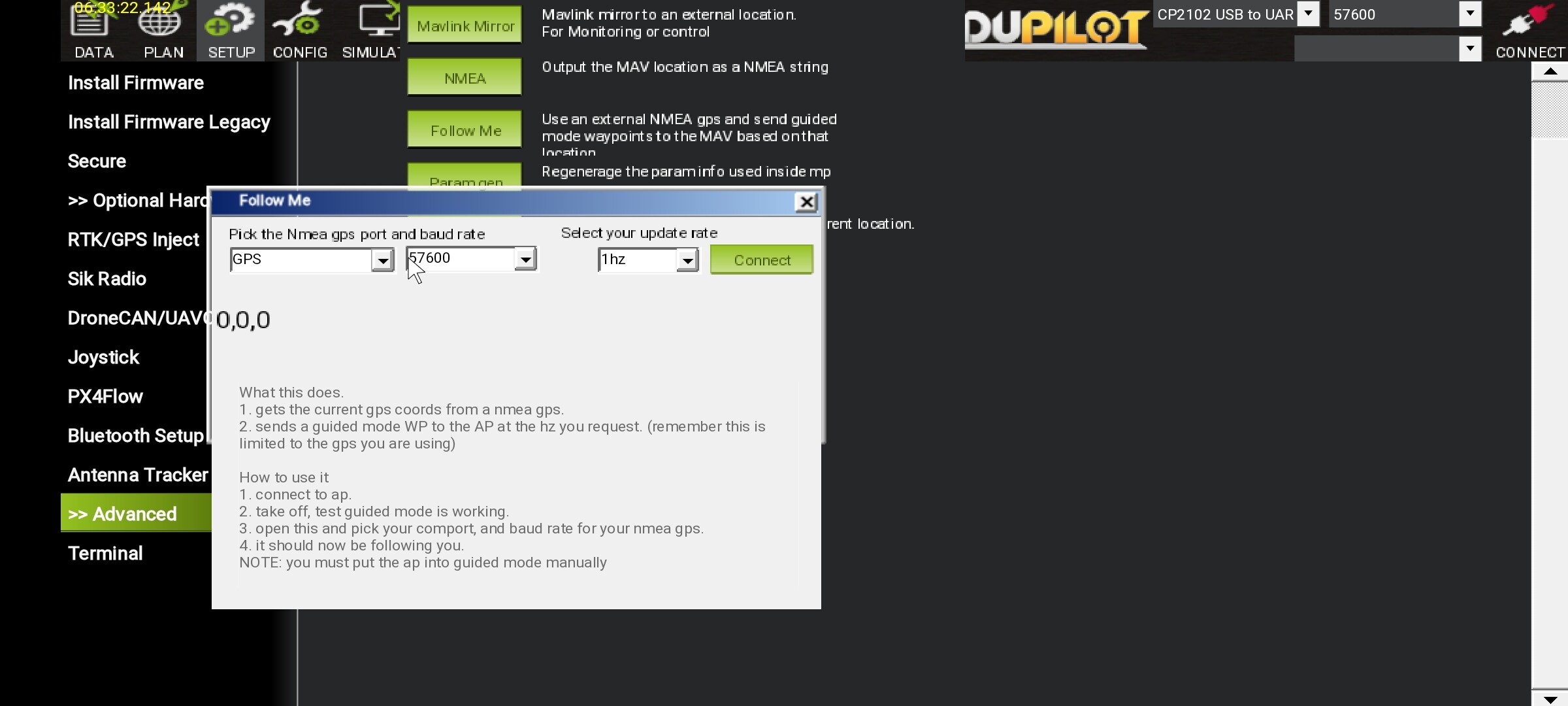
When I go to the setup page, It seems Mission Planner doesn’t see any GPS signals?
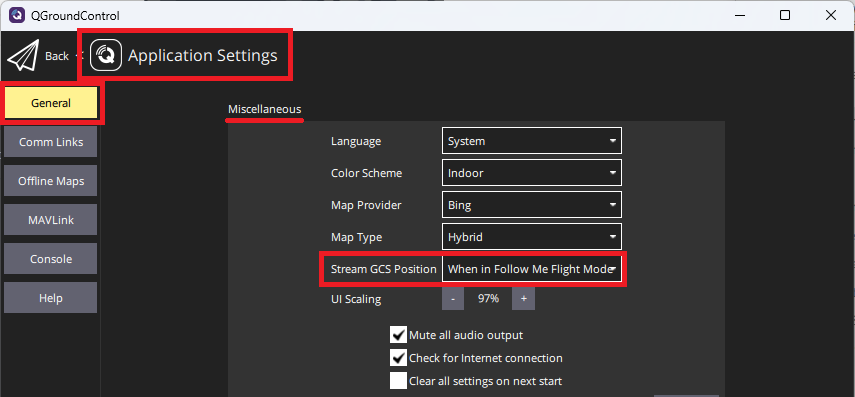
I agree that using QGC should be better on a phone and I think that @hwurzburg has successfully tested this in the past but I’m not sure whether a special version of QGC was required or not.
By the way, there are basically two ways that this can work:
the ground station is responsible for sending velocity or position commands to the vehicle while it is in Guided mode to cause it to follow the user
the ground station can simply send its position to the vehicle and the vehicle can then be put into follow mode.
The last time i used that function was with the tower app for android but it was a long time ago and I dont know if its still compatible as its not been updated in almost 7 years.
Thank you all for helping! Unfortunately I messed up the tuning of the boat that I have currently with me and won’t be able to test any time soon. Maybe I can re-tune today again but it will take some time as I’m still in the learning phase.
Ah, you want return-to-me instead of the regular RTL. Ideally the ground station would handle that … lacking that a custom lua script would probably be required… for example we have this set-home-to-vehicle-location script but this is not quite what you need.
{kind=link}