First you must see this my movie: Movie
In manual mode everything works ok.
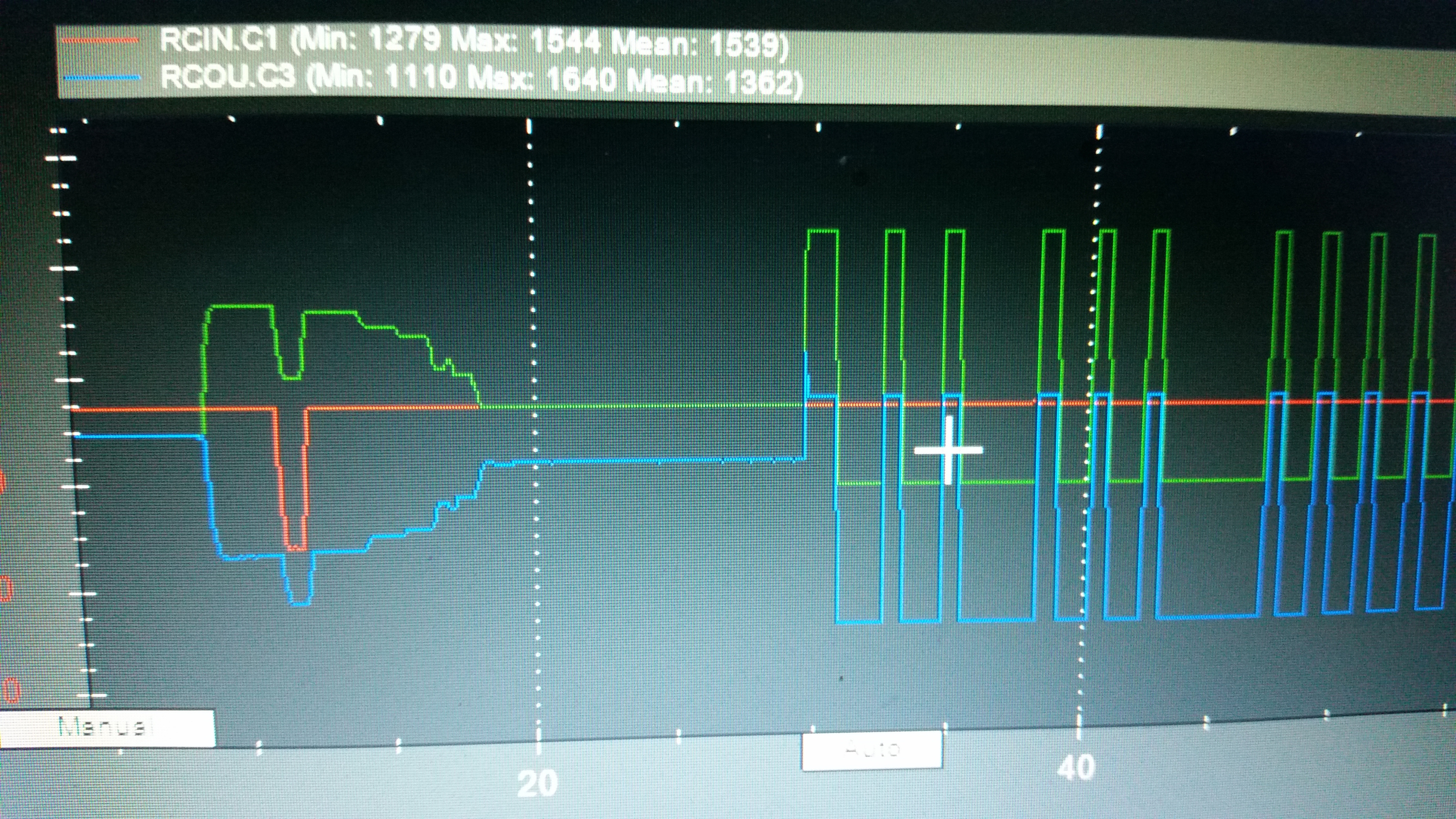
In autonomous mode is problem with engines.
Boat floats along the right lines, but never run both engines.
On the some times works only one engine as you see on movie.
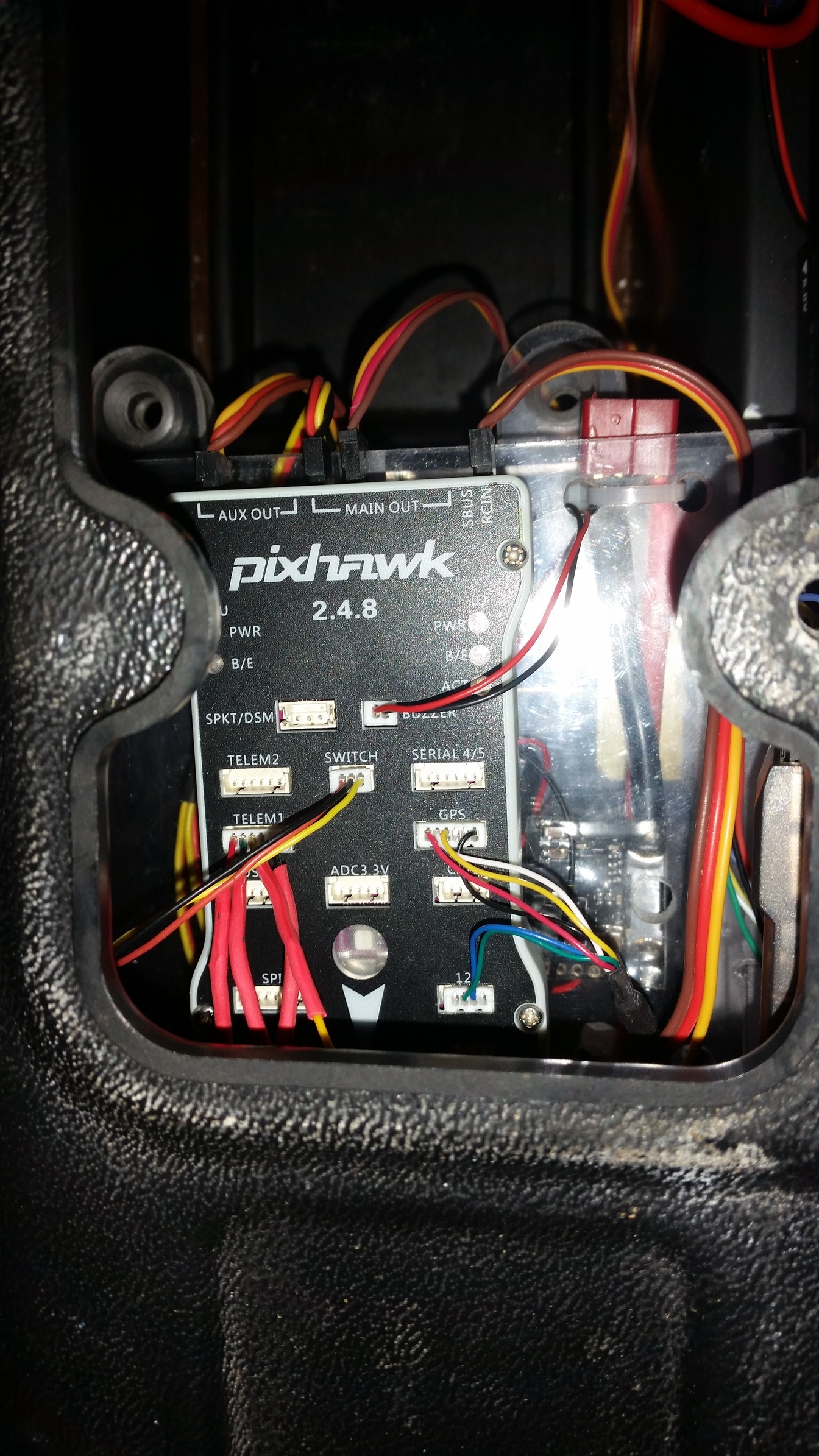
I’m using Pixhawk 2.8 , and ardurower 3.1.beta4 software.
What is a Pixhawk 2.8 exactly? Is that STM32 32bit based hardware or APM style 8bit hardware?
To diagnose we need a log file and a LOT more details. Can you operate the boat in Steering mode? I assume your trying to use skid steering? What output channels do you have your motors connected to?