I am having problems getting the Skid Steer to work. I can set the servos 1 and 3 to left and right motor throttle and it works in Auto mode but not in manual mode. In order for Skid Steer to work in Manual mode I have to change servos 1 and 3 to correspond to the correct RC channel. This will not let the Auto mode work for Autonomous Missions.
For some reason when I set servos 1 and 3 to Left and Right Motor Throttle and place the rover in Manual mode the RC control goes back to a conventional “Throttle on the left stick and steering on the right” mode instead of 2 paddle steering. I am still working on it but any help would be awesome.
PS I have Pilot-Steering set to for 2 paddle control.
Thanks for the response. I have these settings. This works in Auto mode but not in manual mode. If I set Servo1 and Servo3 to RC_Passthrough or Rc_Channel 2 and 3 then the RC will drive the motors in a Skid Steer fashion but the it will not work in AUTO mode. If i set it up with PRAM 73 and 74 then Auto will work but manual reverts back to throttle on the left stick and steering on the right. this would not be a bad thing except for the fact that it wrecks the motors because the vehicle is set up to be a differential drive. so if both motors are spinning forward and I try to turn it then 1 motor slams into reverse. this causes and amperage spike and the flight controller resets.
When I arm the rover it immediately sends servo 1 and 3 to full reverse (1100 pwm). then if I swithch to Auto mode Servo 3 goes to full power ( 2000 pwm) and servo 1 is all over the place. i would expect this if the Pilot steer was set to 0 (throttle on 3 and steering on 1) but I have it set on Pilot steer 1 ( 2 paddle steering).
Tim that may be a wrong radio calibration. If you have mixer in rc radio dont turn it off before calibration and dont move your trottle stik in reverse position during calibrition.
Hey there. I’m experiencing the exact same problem with my skid steering setup.
As long as I Arm in hold it sends PWM 1500. If I then switch to manual it goes immediate to 1100. If I switch to steering it gradually increases to 2000. The only mode that seems to work is loiter.
That is another problem…I’m also experiencing “Bad Logging”… but I was able to find some logs on the flashcard when I take it out of the pixracer and put it in a card reader. I don’t really know too much about logs, so I hope this is what you are looking for.
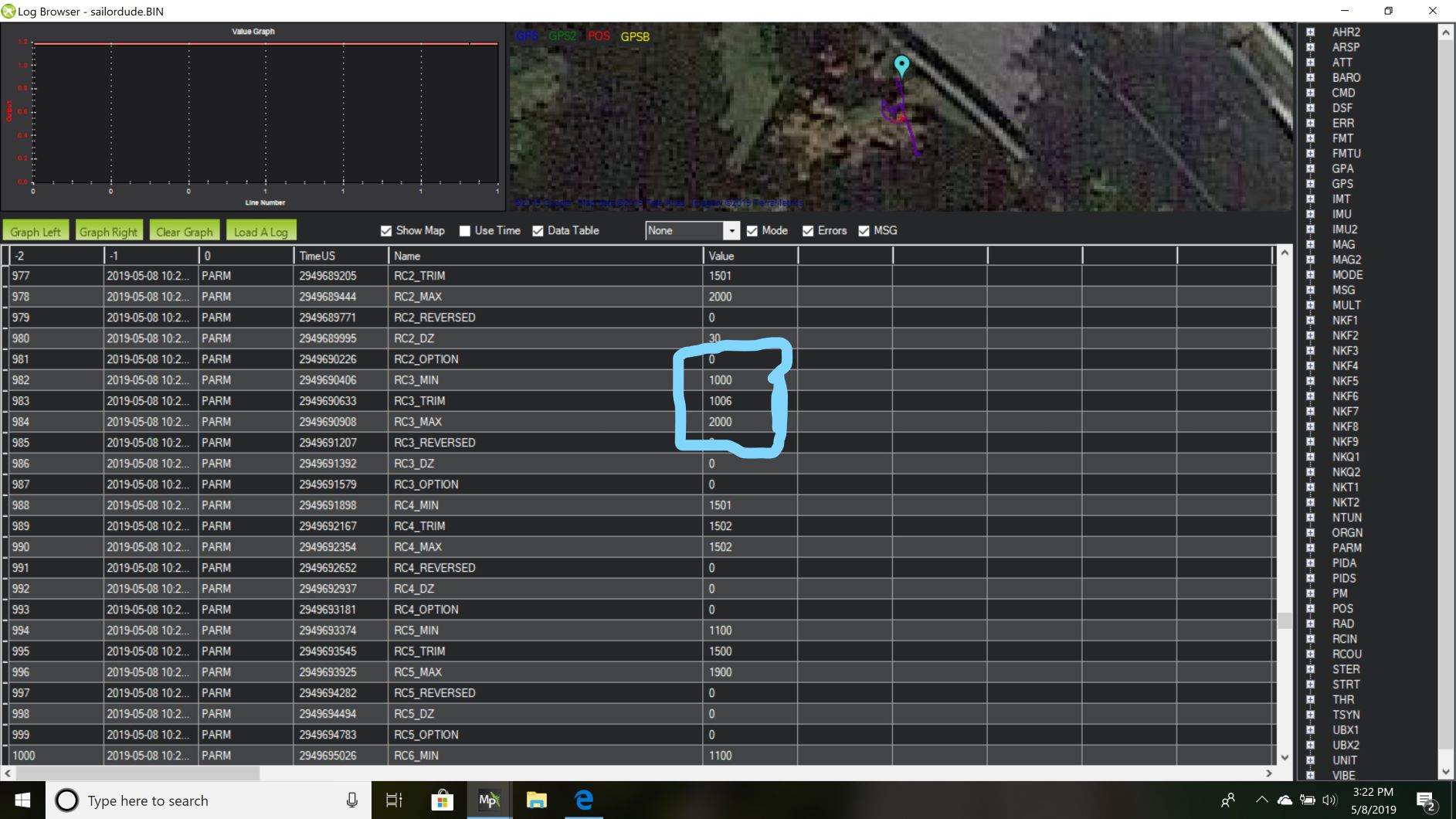
This is a pretty good representation of what happened Pic of Log
We are using ArduRover 3.5.0 on a picracer, Mauchmodule, two BasicMicro 60A ESC and two standard electrical trolling motors as our setup.
While initializing, I power up the Pixracer in HOLD mode, then Arm it. Then power up the ESC so that the first PWM signal they get is 1500 and it saves it as its middlepoint. (This way i dont have to use the “MCU” function which has the dreaded “signal loss of signal shutdown” disable included…
Assuming you are using a mode 2 transmitter and using just the right stick I would recalibrate it and also set the RCMAP parameters back to the default settings. I definitely see a calibration issue with some RC #'s and the RCMAP numbers look suspicious. The RC MAP may be correct.
{kind=link}