Hi Anton,
I think one of the first thinks now is to learn how to assign the switches and knops of your RC-transmitter to the RC-channels. This has nothing to do at this moment with the FC and FC settings. But you can use the misson planner radio setup page to check the results.
I have no high knowledge of your RC-System, Iam only using old futaba (robbe) systems. But if we go step by step throw the setup menu of your transmitter we can fix it.
So first give exact information which RC transmitter and receiver you are using. Is it with default firmware and is a manual (link) available?
Hi Juergen
Thank you so much, I managed to get 2 switches assigned using QGround Control. It is much easier and straight forward than Mission Planner.
I don’t think I will use more than the 2, SWA switches between Manual and Auto and SWD arms and disarms the autopilot
You will find the manual at the link below
It is a bit of a process with having to go to a number of settings
First it is the Aux Channel setup
Then assign switches
Then Aux switches
Then activate switches and knobs
The most important thing is you have to press and hold the Cancel button for a few seconds to store the settings
The RC transmitter is the Flysky FS-I6X and the firmware is default
This is one massive learning curve not having had any exposure to RC before.
Hi Anton,
If you have now set two switches for channels 5 and 6, that’s already good. Didn’t you write that one of the four switches is a three-position switch? I would then use that as a mode selector at least. It would be even better to take one of the rotary knobs and use it to select all 6 modes. However, you have to mark the respective position on the transmitter with a marker in order to always get to the defined rotary knob position.
The manual is unfortunately very rudimentary, especially in the Flysky version. I found a German manual from Reely that is a bit better but not very good. The transmitter’s options are also apparently somewhat limited, at least with the default firmware. It doesn’t seem to be possible to mix two switches directly on one channel, which is a shame. But it is also just a very cheap remote control that is completely sufficient for your application, as far as I understand you correctly.
Hi Juergen
Thank you
I hear you yes and it is a rather cheap radio and it suits my budget.
Not a very easy straight forward thing to work with
Simplicity is the answer and I have nothing else to compare the radio against for what it can and cannot do.
I trust Yuri’s judgement on this one, I have no knowledge on this
It is serving the purpose and that is about it
When done with this project I will most probably give it to some kid that wants to get into RC, as a token of appreciation for the support from everybody here.
1 Like
Hello Juergen
The biggest issue is that I have no experience with RC at all and my expectations are a bit much I think.
For instance I centered the throttle stick before arming. If I do that the wheels startup immediately, either forward of reverse.
The throttle stick is extremely sensitive and difficult to position so that the motors stop.
This morning the throttle was left down and the autopilot armed. The motors did not startup and moving to throttle up made the motors go forward but no reverse which doesn’t matter because forward is really all that is required.
Turning is smooth but can be better I guess. That’s all got to do with the tuning that Yuri suggested and I agree with him.
It is going to take a while to have everything perfect.
The big bonus with the radio now is that there is no longer the need to cart laptops etc downstairs to run the rover
Thank you for your advise it is appreciated.
I try a lot of different things to see what the response would be.
It would be very interesting to see what will happen if the tuning process I’d complete what will happen if it navigates on its own
So far I have understood the following functions/settings of your RC system.
Channels 1-4 are controlled by the sticks
Channel y (5 or 6 ?) is operated by a bipolar switch FC function Mode Switch
Channel z (6 or 5 ?) is operated by a bipolar switch FC function ARM / DISARM
RCz_OPTION → 153 (ARM/DISARM)
If arming is done via a separate channel of the remote control, the rudder arming method can/should be deactivated
ARMING_RUDDER → 0 (disabled)
For the throttle channel (x = channel number)
RCx_TRIM must be in the middle (average of RCx_MIN and RCx_MAX)
This is done automatically during RC calibration via Mission Planner if, after completing the Min Max movement of the sticks, all the throttle sticks are also moved to the middle position and only then is the calibration completed. We have to ask @Yuri_Rage if and how the dead zone around zero throttle can be increased, I don’t know his script in detail. How is your MOT_THR_MIN parameter set
Hi Juergen
The sticks are on channels 1 - 4
Switch SWA is on channel 5 and Switch AWD is on channel 6 as far as I can see yesy
Switch SWA toggles between Hold and Acro at the moment and switch SWD arms and disarms the autopilot yes
The rover does not require reverse and arming it with the throttle down suits me to a tee as the motors only respond when I push it up and the motors stop when I pull it down
The steering also looks fine and you can do small adjustments as it drives
I have done the calibration Min and Max thing
The “dead zone” does not really worry me at all presently
The thing runs and it can be steered, it also runs pretty straight if just using the throttle to let it run forward and stops when pulling it back. It doesn’t stop immediately when the throttle is pulled back but that does not bother for now.
I have no idea how it will respond when self navigating in Auto and am busy looking at the tuning parameters which are slowly starting to make some sense.
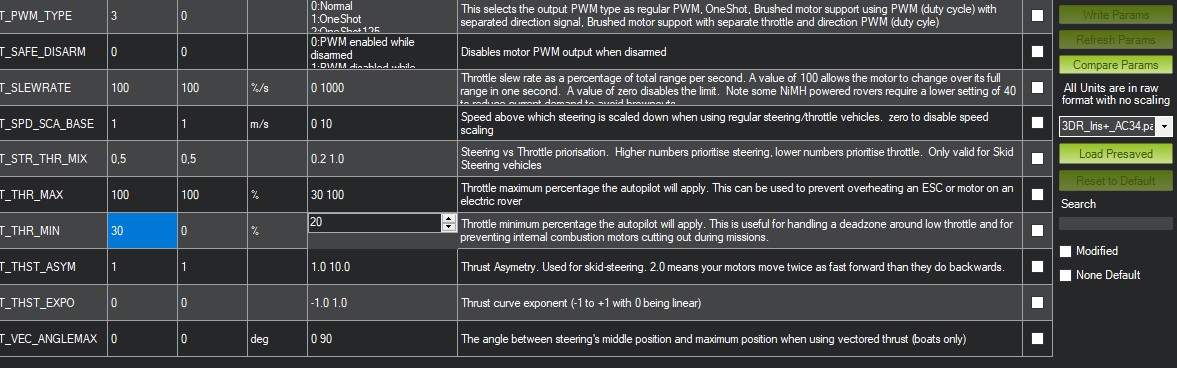
MOT_THR_MIN is set to 20 which appears to be default
As it now it is working fine for me as I can at least drive it even if it is all over the place but at least it is responding to the radio which is more than I had
I am working through the tuning documentation that Yuri provided the links for, am taking my time with it to try and get it as perfect as possible
Slowly getting there, all very new and sometimes confusing but I will get it working properly
With regards to the script I have not got an idea apart from that it makes the thing work and only Yuri will be able to enlighten us on that
I have a python script that I used on the Raspberry that basically just runs the motors forward and reverse from 0 to 100 % and then slows them down from 100 to 0% and stops. It also turns the rover left and right through 90 degrees and back to straight. It basically uses PWM same as the RC side but their appears to be a few differences in how the rover runs for instance with the python script the rover runs straight, I test it by running it along a painted parking bay demarcation line whereas with the RC it looks like it is drifting to the right. Could be the terrain or my imagination but I am working on it
Thank you for you advise and assistance
It won’t arm with the throttle off center. That’s the issue with no response when you try.
Set:
RCMAP_PITCH,3
RCMAP_THROTTLE,2
This should put both steering and throttle on the right spring centered stick.
Thank you Yuri, appreciated
I am busy working on the tuning
The parameters were changed as you said. Both functions now on the right hand stick
Hi Yuri
The throttle control in the basic tuning parameters has a minimum value of 20
The motors when testing stops responding at 30, does this matter?
Then set 30. You can do these things experimentally on your own when it appears common sense applies.
It doesn’t accept 30, changes back to 20
Could you see anything in the bin file I sent you?
Click “yes” on this dialog and you can set whatever you want.
If you’re using QGC, I have no idea how to set an out of range parameter, as I don’t use it for this reason (among many others).
Use Mission Planner.
There’s nothing to see in the log other than that you have arming set to RC7 and mode selection on RC8.
I think you solved arming via RC.
Now flip the switch you want to use for mode changes while watching the RC calibration screen (just monitor, don’t calibrate again). Whatever channel moves, set MODE_CH to that number.
Then use the FLIGHT MODES screen to set the modes you want to use (you can flip the mode switch to see which of the 6 selections are highlighted as you go).
It is channel 5 that moves and presently it is set for Manual and Acro modes
Channel 6 is used for arming and disarming
The throttle minimum defaults back to 20, cannot see that it really affects the performance of the rover, might affect something that I am not aware of though, you would know better.
I don’t really use QGC, the only reason I was using it was to try and calibrate the compass which it wouldn’t and while there I had a look at the radio calibration where I saw the modes highlighted when flicking the switches
Okay I have tuned what I could according to the webpages on tuning.
The turn tuning I left pretty much at default
The rover does not weave and runs pretty straight, lined it up with a painted parking demarcation line and increased the throttle, it ran the straight along the line, the line is 5meters long
Is there anything else I need to investigate and look at?
I showed you how to change that.
How does it drive in acro mode?
I did do that but it goes back to 20
After clicking yes, click the write button again.
Then you are not connected.
Don’t know how that happened but yes was disconnected my apologies