I write this message because I am perfectly lost with the 4.4 version of ardurover and the new settings available for steering and trajectory (PSC).
For a new project, I worked as usual ; set speed, set steering and pivot turn. All check in Mission Planner with real time graph, GCS, PID desired / achieve. Settings are good.
But, in auto mode, when I test square mission and corner cut, this is the big disaster.
First time, boat was unable to directly turn. It goes forward, then made a loop to come back on the good trajectory.
So, I check all documentation, I (re)did all possible, check gx / gz acceleration to set better values, I tried a lot of different / extreme settings.
I have a better result, but nothing equal what I had with previous versions (my last work was 4.2 version).
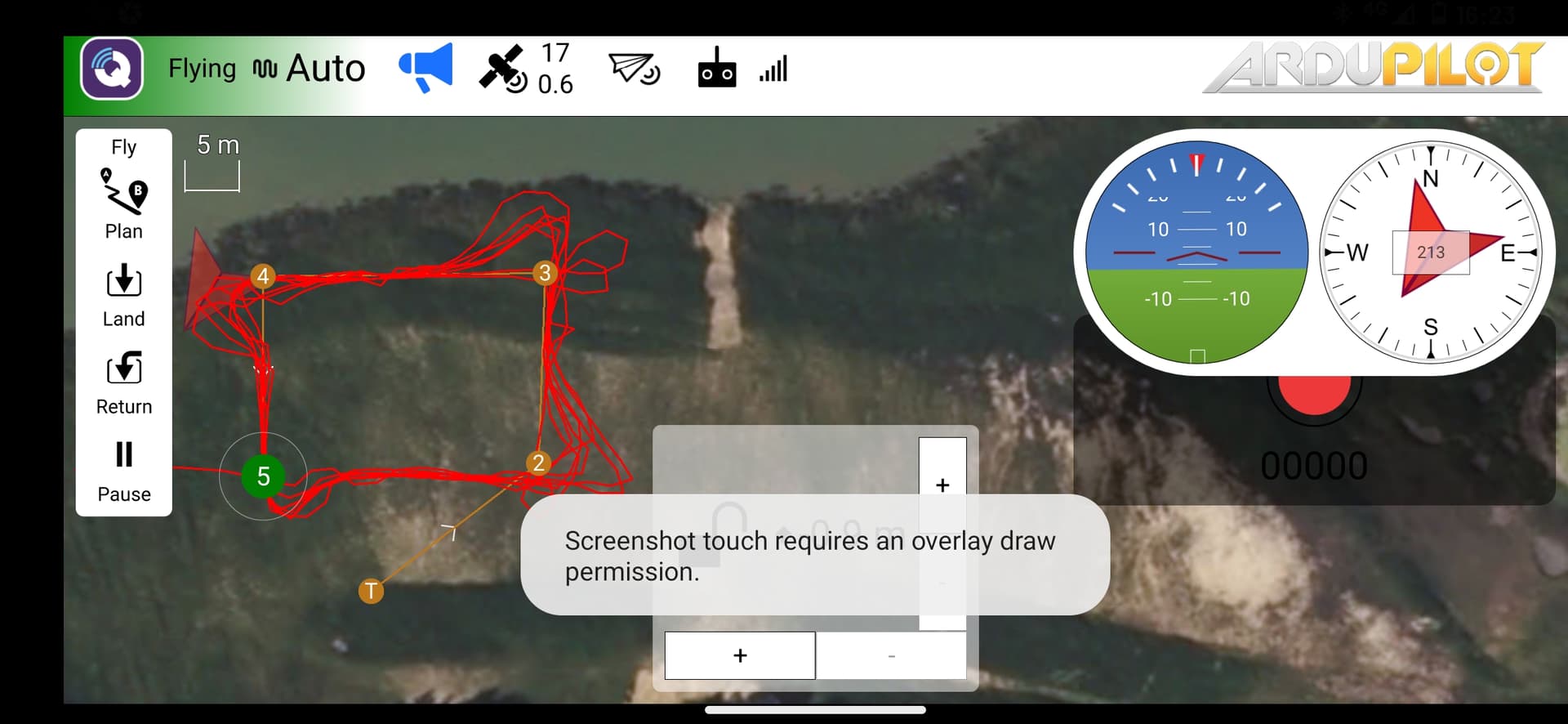
Here is a screen of my last try.
In this try, I was working on PSC_VEL output. I increasd a lot the P value, boat stopped… With a medium value (1.8) result is the best, that is part of the picture.
I do not know what to do and implore your help : )
Facts about the boat ;
2 motors - skid sterring
small size 60x40x30cm
heavy load (6kgs approx)
two right propellers causing an important “torque effect”. Channel left motor is restricted (max value chanel 1750/2000, right channel is 1950/2000) to allow a good control in manual mode
I can provide more info about settings and parameters if you need.
In general the default PSC_ values should work. It’s actually much more likely that it is an issue with the lower level steering controller.
Any chance you could post an onboard log? If you’re uncomfortable sharing publicly then PM it to me. Sharing publicly is best if possible because then others can see it as well.
I will post a log in the coming 2 days that is ok.
I check other discussions here and there is a case with bad GPS / EKF with a strage third GPS that appears in the log, I wonder if that is not one of my problem as I remember seing a third GPS in the parameters list, I have to check this I am not sure of this.
The 3rd GPS that may appear is some logs is the output of GPS blending. Having it logged makes it easier to see the result of the averaging the two GPSs.
In general it is fine to leave the contents of the SD card after a firmware upgrade. It won’t do any harm.
The log you’ve sent me separately is a 3.5.0 log though which is 5 years old now so if you could upgrade to something newer, ideally 4.5.0-beta and produce a log I’ll have a closer look.
By the way, maybe create a large-ish rectangular Auto mode mission and then send me the log of it running through that mission? rectangular missions are a good test because it shows us the vehicle’s performance both at the corners (e.g. a sudden large turn request) and also along straight lines.