Hi,
I fly a few days ago X-UAV " Clouds" in Arduplane v3.8 .I used MIssionPlanner v1.3.49 to plan an automatic waypoint task
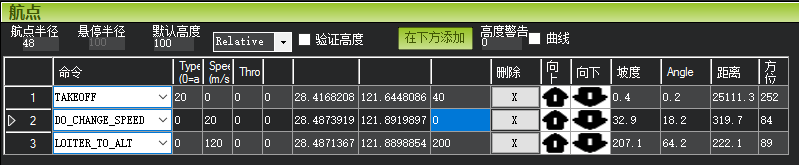
The first command is Takeoff,Set takeoff altitude=40m,Pitch angle=20.
The second command is DO_CHANGE_SPEED,Set airspeed=20m/s.
The third command is LOITER_TO_ALT,Radius=120m,Altitude=200m.
The problem that appears:take off by hand,The plane began to climb, and I watched the ground station show that the airspeed exceeded the stall speed,but the altitude has not yet reached 40m.The plane began to slide on the left and at the same time lost its height.I manually control pull pitch, no effect.Then the plane went out of the sea.
Look forward to everyone’s reply! Thanks!