After about 70 unsuccessful attempts in the past three months to realize auto landings with Lidar and reverse thrust using LAND_FLARE_ALT rather than LAND_FLARE_SEC , I decided to make things simpler and verify how good Arduplane deals with a simple mission with an altitude change between two waypoints.
The mission has a waypoint(#3) at 30 meters altitude, the following waypoint(#4) is located 130 meters far at 2 meters altitude, then a waypoint(#6) 143 meters far at the same altitude.
Here in theory the mission descent slope with WP#4 at 200 meters to allow a reduced descent angle.

The plane has both Lidar and reverse thrust , TECS parameters are the default ones.
Here how it looks in Mission planner

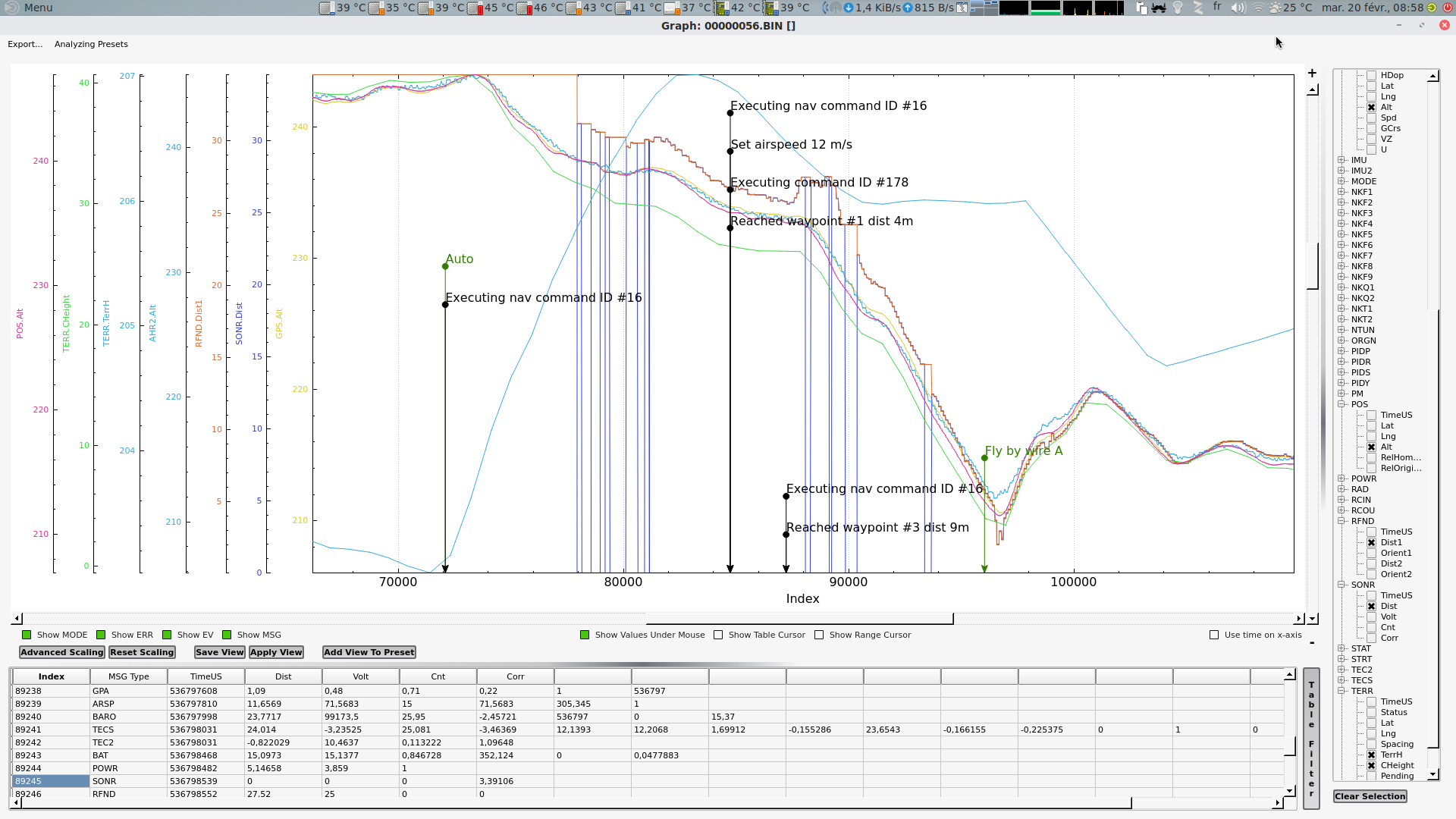
Here is a video of what happened with 200 meters distance between the two waypoints 3 and 4 , Bin file 56.
The plane missed completely by at least 60 meters waypoint 4 and had a totally wrong descent slope . Waypoint 4 correspond to the red stuff on ground.
I had to switch to FBWA to avoid the ground.
A previous attempt with 130 meters distance between the two waypoints 3 and 4. Bin file 55.
Things were better , the waypoint was reached but at wrong altitude but more bad the plane continues his descent slope till 30 cm from ground while it was supposed to fly straight at the same altitude to waypoint 6.
The good : The plane use reverse thrust to control the plane speed pretty well but I ignore , since the engine is at the back of the plane , if the air pushed towards his V-Tail reduce pith authority and get the flight controller “confused” .
Tecs default.param (14.2 KB)