I am trying to install Ardupilot on my windows 10 using ubuntu through the Microsoft store
Ubuntu 18.04 LTS running on windows 10
I have Xlaunch/Xming installed as well
The Ardupilot software is supposed to start as shown in the guide but it doesn’t, The world does not open but I was able to use Ardupilot the first time I installed it (picture attached) but after closing it I was not able to get it to start again hence the issue. I had no control of the copter (maybe because I didn’t install ROS Control)
Ardupilot initial successful trial:
The Ardupilot setup manual I am using :
https://ardupilot.org/dev/docs/using-gazebo-simulator-with-sitl.html
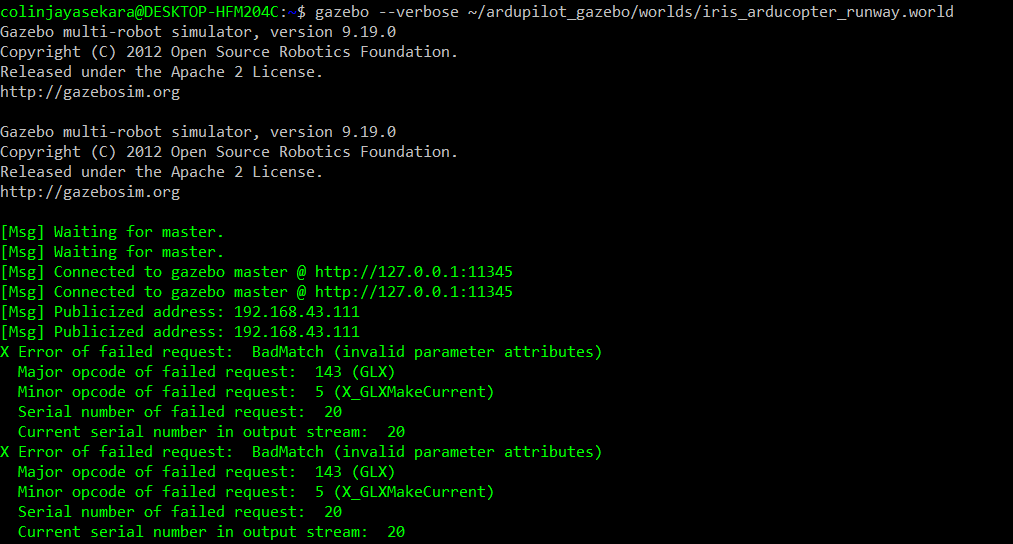
I try running the following in 1 terminal:
$ gazebo --verbose ~/ardupilot_gazebo/worlds/iris_arducopter_runway.world
System response:
Gazebo multi-robot simulator, version 9.19.0
Copyright (C) 2012 Open Source Robotics Foundation.
Released under the Apache 2 License.
Gazebo multi-robot simulator, version 9.19.0
Copyright (C) 2012 Open Source Robotics Foundation.
Released under the Apache 2 License.
[Msg] Waiting for master.
[Msg] Waiting for master.
[Msg] Connected to gazebo master @ http://127.0.0.1:11345
[Msg] Connected to gazebo master @ http://127.0.0.1:11345
[Msg] Publicized address: 192.168.43.111
[Msg] Publicized address: 192.168.43.111
X Error of failed request: BadMatch (invalid parameter attributes)
Major opcode of failed request: 143 (GLX)
Minor opcode of failed request: 5 (X_GLXMakeCurrent)
Serial number of failed request: 20
Current serial number in output stream: 20
X Error of failed request: BadMatch (invalid parameter attributes)
Major opcode of failed request: 143 (GLX)
Minor opcode of failed request: 5 (X_GLXMakeCurrent)
Serial number of failed request: 20
Current serial number in output stream: 20
Picture:
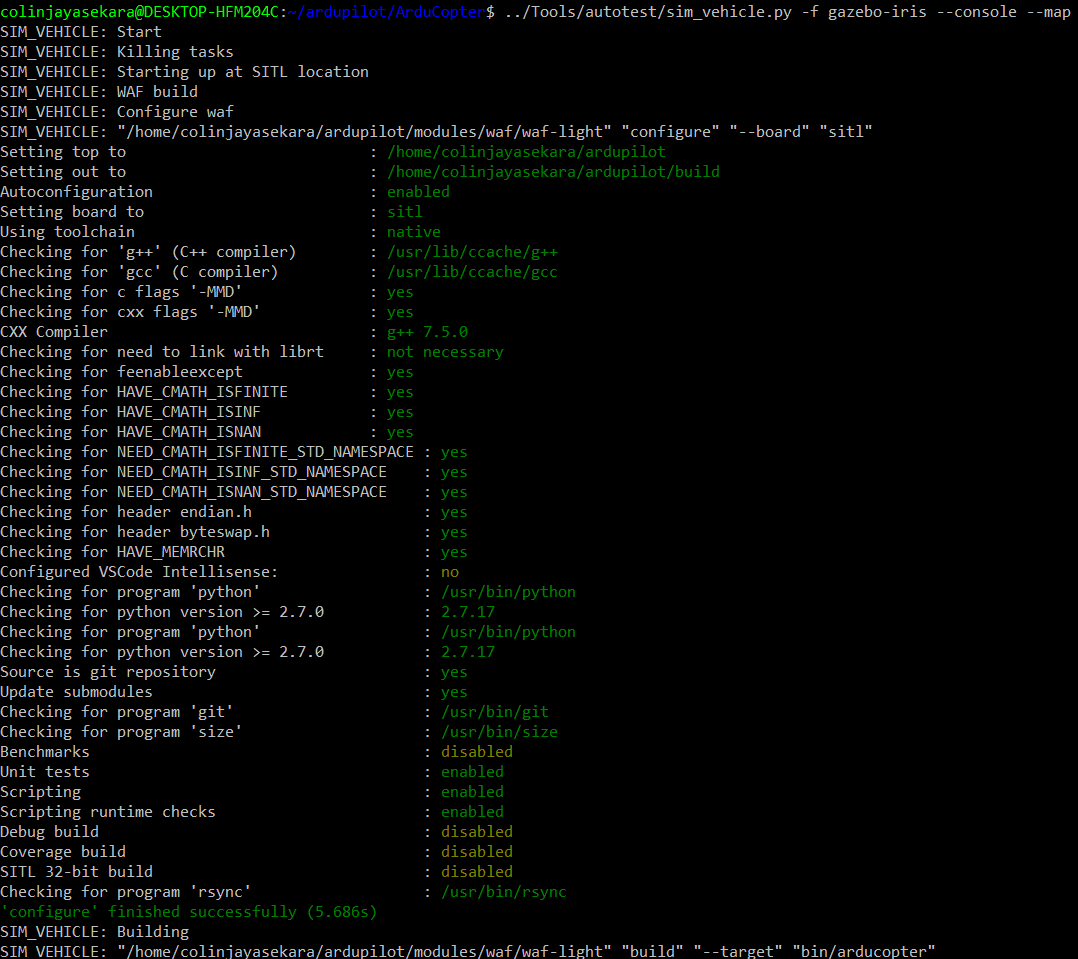
I run the following in Terminal 2:
$ cd ~/ardupilot/ArduCopter
/ardupilot/ArduCopter$ …/Tools/autotest/sim_vehicle.py -f gazebo-iris --console --map
System response:
SIM_VEHICLE: Start
SIM_VEHICLE: Killing tasks
SIM_VEHICLE: Starting up at SITL location
SIM_VEHICLE: WAF build
SIM_VEHICLE: Configure waf
SIM_VEHICLE: “/home/colinjayasekara/ardupilot/modules/waf/waf-light” “configure” “–board” “sitl”
Setting top to : /home/colinjayasekara/ardupilot
Setting out to : /home/colinjayasekara/ardupilot/build
Autoconfiguration : enabled
Setting board to : sitl
Using toolchain : native
Checking for ‘g++’ (C++ compiler) : /usr/lib/ccache/g++
Checking for ‘gcc’ (C compiler) : /usr/lib/ccache/gcc
Checking for c flags ‘-MMD’ : yes
Checking for cxx flags ‘-MMD’ : yes
CXX Compiler : g++ 7.5.0
Checking for need to link with librt : not necessary
Checking for feenableexcept : yes
Checking for HAVE_CMATH_ISFINITE : yes
Checking for HAVE_CMATH_ISINF : yes
Checking for HAVE_CMATH_ISNAN : yes
Checking for NEED_CMATH_ISFINITE_STD_NAMESPACE : yes
Checking for NEED_CMATH_ISINF_STD_NAMESPACE : yes
Checking for NEED_CMATH_ISNAN_STD_NAMESPACE : yes
Checking for header endian.h : yes
Checking for header byteswap.h : yes
Checking for HAVE_MEMRCHR : yes
Configured VSCode Intellisense: : no
Checking for program ‘python’ : /usr/bin/python
Checking for python version >= 2.7.0 : 2.7.17
Checking for program ‘python’ : /usr/bin/python
Checking for python version >= 2.7.0 : 2.7.17
Source is git repository : yes
Update submodules : yes
Checking for program ‘git’ : /usr/bin/git
Checking for program ‘size’ : /usr/bin/size
Benchmarks : disabled
Unit tests : enabled
Scripting : enabled
Scripting runtime checks : enabled
Debug build : disabled
Coverage build : disabled
SITL 32-bit build : disabled
Checking for program ‘rsync’ : /usr/bin/rsync
‘configure’ finished successfully (5.736s)
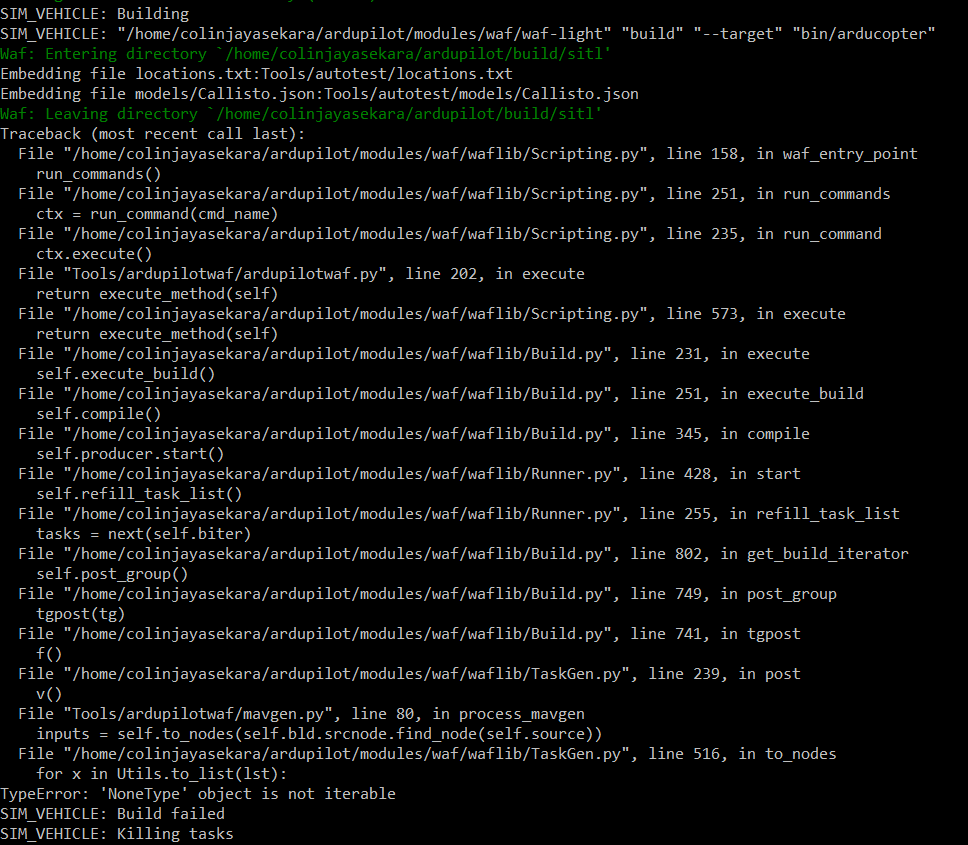
SIM_VEHICLE: Building
SIM_VEHICLE: “/home/colinjayasekara/ardupilot/modules/waf/waf-light” “build” “–target” “bin/arducopter”
Waf: Entering directory /home/colinjayasekara/ardupilot/build/sitl' Embedding file locations.txt:Tools/autotest/locations.txt Embedding file models/Callisto.json:Tools/autotest/models/Callisto.json Waf: Leaving directory /home/colinjayasekara/ardupilot/build/sitl’
Traceback (most recent call last):
File “/home/colinjayasekara/ardupilot/modules/waf/waflib/Scripting.py”, line 158, in waf_entry_point
run_commands()
File “/home/colinjayasekara/ardupilot/modules/waf/waflib/Scripting.py”, line 251, in run_commands
ctx = run_command(cmd_name)
File “/home/colinjayasekara/ardupilot/modules/waf/waflib/Scripting.py”, line 235, in run_command
ctx.execute()
File “Tools/ardupilotwaf/ardupilotwaf.py”, line 202, in execute
return execute_method(self)
File “/home/colinjayasekara/ardupilot/modules/waf/waflib/Scripting.py”, line 573, in execute
return execute_method(self)
File “/home/colinjayasekara/ardupilot/modules/waf/waflib/Build.py”, line 231, in execute
self.execute_build()
File “/home/colinjayasekara/ardupilot/modules/waf/waflib/Build.py”, line 251, in execute_build
self.compile()
File “/home/colinjayasekara/ardupilot/modules/waf/waflib/Build.py”, line 345, in compile
self.producer.start()
File “/home/colinjayasekara/ardupilot/modules/waf/waflib/Runner.py”, line 428, in start
self.refill_task_list()
File “/home/colinjayasekara/ardupilot/modules/waf/waflib/Runner.py”, line 255, in refill_task_list
tasks = next(self.biter)
File “/home/colinjayasekara/ardupilot/modules/waf/waflib/Build.py”, line 802, in get_build_iterator
self.post_group()
File “/home/colinjayasekara/ardupilot/modules/waf/waflib/Build.py”, line 749, in post_group
tgpost(tg)
File “/home/colinjayasekara/ardupilot/modules/waf/waflib/Build.py”, line 741, in tgpost
f()
File “/home/colinjayasekara/ardupilot/modules/waf/waflib/TaskGen.py”, line 239, in post
v()
File “Tools/ardupilotwaf/mavgen.py”, line 80, in process_mavgen
inputs = self.to_nodes(self.bld.srcnode.find_node(self.source))
File “/home/colinjayasekara/ardupilot/modules/waf/waflib/TaskGen.py”, line 516, in to_nodes
for x in Utils.to_list(lst):
TypeError: ‘NoneType’ object is not iterable
SIM_VEHICLE: Build failed
SIM_VEHICLE: Killing tasks
Picture:
I have Xlaunch/Xming installed as well
Please let me know what I’m doing wrong and what I might be able to do to fix this issue permanently?
thanks.