Hello everyone, we are a rookie team for ardupilot and its softwares. We are building a tailsitter UAV for this year but starting is the hardest thing as you know. We already read the documents and worked with arducopter.
I want to explain my problem with 2 line of codes.
When I run this command on arduPlane folder, it works: sim_vehicle.py -f quadplane --console --map
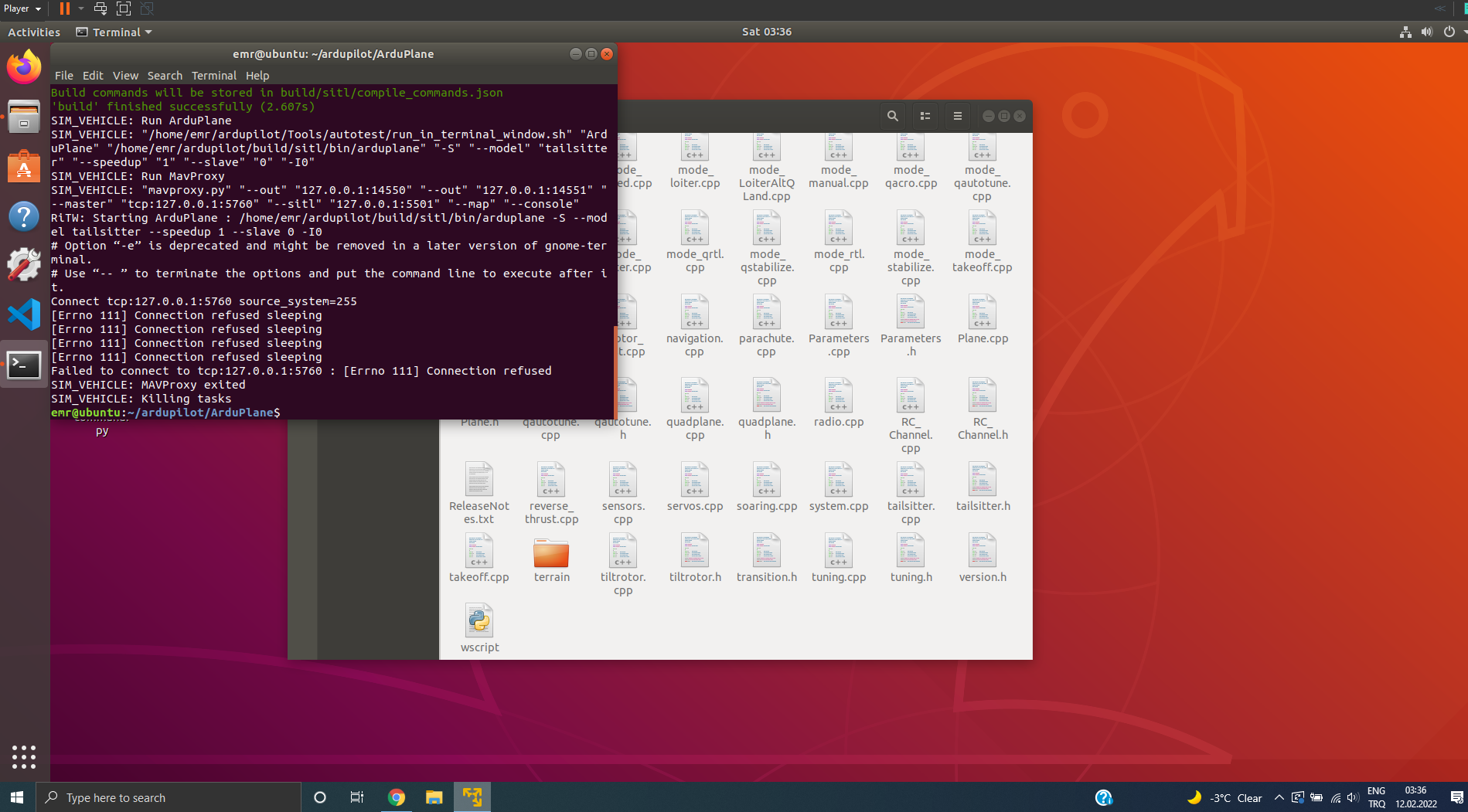
But when I run this command on the same folder, it doesn’t work: sim_vehicle.py -f tailsitter plane --console --map
according to the docs, it should work. docs: Using SITL — Dev documentation
Here is my console when I run the command that doesn’t work:
Also our tech stack is for simulations: Dronekit - Ardupilot SITL - Gazebo. If you have any knowledge in these softwares and you want to help us, you can give an e-mail address so we can be in touch and ask questions.
@emir if you are interested in getting Ignition Gazebo to run with SITL and a tailsitter I can help. We (@khancy and I) have been doing some work to upgrade the ardupilot_gazebo plugin to work with OSRF’s replacement for Gazebo11, and as part of this have provided a selection of models that have been configured to run on the new environment.
The best place to ask questions is here - that way other people with similar questions can benefit from the discussion. We also need to add instructions to the main wiki for Ignition, and a conversation here will help to get the level of detail correct.
If you’re posting logs from a terminal it’s better (more readable) to post the terminal output into a code block like so (use the </> button to format the block. For example a SITL session for Rover (no Gazebo) gives:
% sim_vehicle.py -N -v Rover -f rover --map --console
SIM_VEHICLE: Start
SIM_VEHICLE: Killing tasks
SIM_VEHICLE: Starting up at SITL location
SIM_VEHICLE: Using defaults from (/Volumes/MacPro2_DV1/Code/ardupilot/ardupilot/Tools/autotest/default_params/rover.parm)
SIM_VEHICLE: Run Rover
SIM_VEHICLE: "/Volumes/MacPro2_DV1/Code/ardupilot/ardupilot/Tools/autotest/run_in_terminal_window.sh" "Rover" "/Volumes/MacPro2_DV1/Code/ardupilot/ardupilot/build/sitl/bin/ardurover" "-S" "--model" "rover" "--speedup" "1" "--slave" "0" "--defaults" "/Volumes/MacPro2_DV1/Code/ardupilot/ardupilot/Tools/autotest/default_params/rover.parm" "-I0"
SIM_VEHICLE: Run MavProxy
SIM_VEHICLE: "mavproxy.py" "--out" "127.0.0.1:14550" "--out" "127.0.0.1:14551" "--master" "tcp:127.0.0.1:5760" "--sitl" "127.0.0.1:5501" "--map" "--console"
Connect tcp:127.0.0.1:5760 source_system=255
Loaded module console
Loaded module map
Running script (/Users/rhys/.mavinit.scr)
Loaded module graph
Log Directory:
Telemetry log: mav.tlog
Waiting for heartbeat from tcp:127.0.0.1:5760
MAV> Detected vehicle 1:1 on link 0
INITIALISING> MANUAL> Received 1160 parameters (ftp)
Saved 1160 parameters to mav.parm
MANUAL>
Logs like this can be searched, are easier to read, and can be copy pasted. Post the entire log including the command (unless you’re really sure the intermediate info is not relevant).
To get started you want to be able to run SITL and use MAVProxy without Gazebo - to ensure that your ArduPilot installation is good. And then install Ignition and run some examples to check that it is working correctly. When you have that we can move onto getting the systems working together.
@rhys First of all, thanks for your reply. I fixed my problem. Also I worked with several tailsitter and arducopter models while using sitl on gazebo classic.
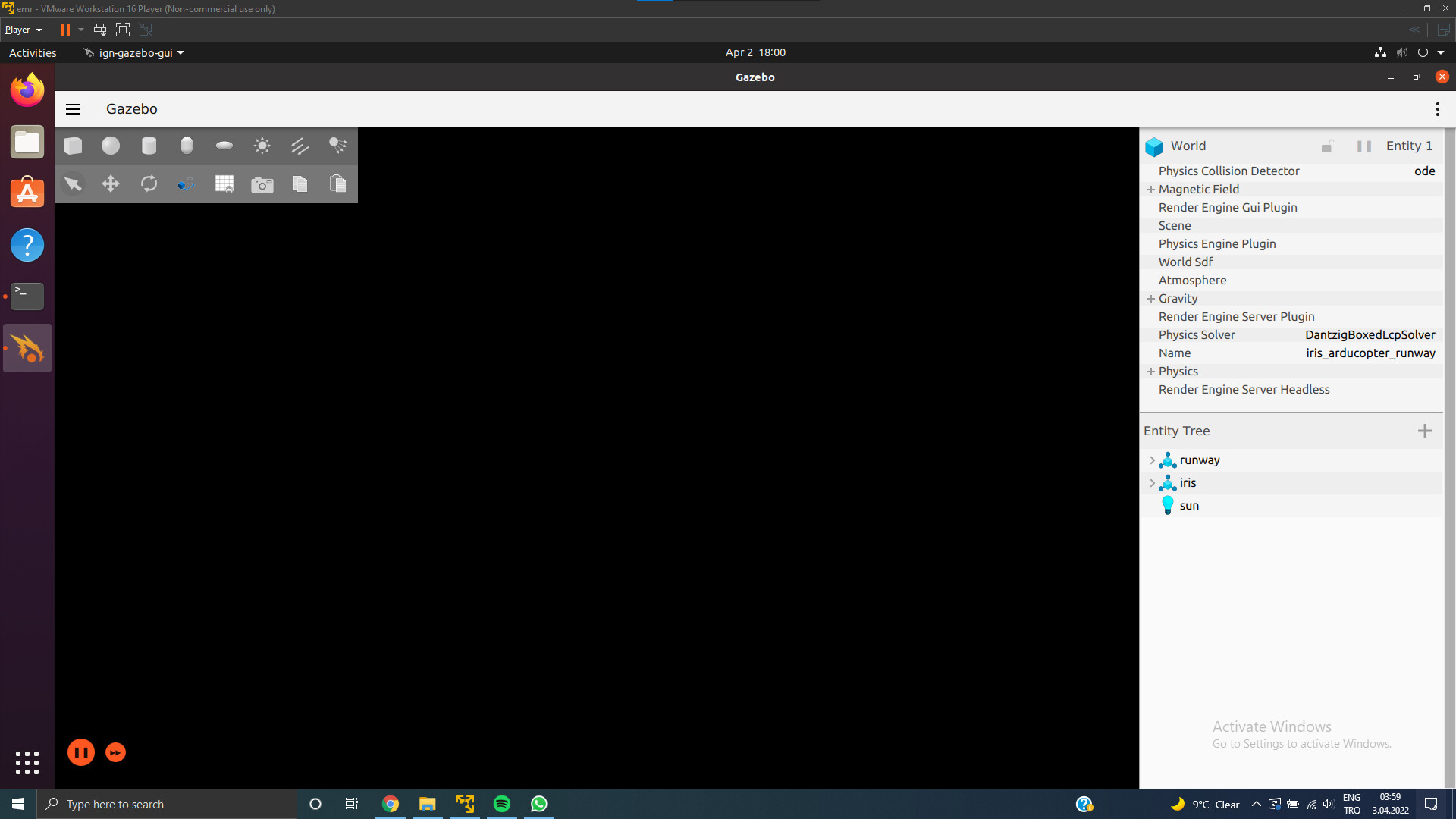
The ignition advice made sense and I tried to use but I couldn’t do that. I have black screen problem in gazebo simulator. I’d like to share a screenshot and my logs as you described.
I did all the steps in this link: GitHub - ArduPilot/ardupilot_gazebo at ignition-fortress
I am using Ubuntu 20.04 with virtual machine and reinstalled ubuntu twice but my problem is not fixed. I searched the black screen problem and literally could not find anything.
Here the ss:
emr@ubuntu:~$ ign gazebo -v 4 -r iris_arducopter_runway.world
[Msg] Ignition Gazebo Server v6.7.0
[Msg] Ignition Gazebo GUI v6.7.0
[Msg] Loading SDF world file[/home/emr/ardupilot_gazebo/worlds/iris_arducopter_runway.world].
[Dbg] [Application.cc:90] Initializing application.
[GUI] [Dbg] [Application.cc:511] Create main window
[Dbg] [Physics.cc:801] Loaded [ignition::physics::dartsim::Plugin] from library [/usr/lib/x86_64-linux-gnu/ign-physics-5/engine-plugins/libignition-physics-dartsim-plugin.so]
[Dbg] [SystemManager.cc:49] Loaded system [ignition::gazebo::systems::Physics] for entity [1]
[Msg] Create service on [/world/iris_arducopter_runway/create]
[Msg] Remove service on [/world/iris_arducopter_runway/remove]
[Msg] Pose service on [/world/iris_arducopter_runway/set_pose]
[Msg] Light configuration service on [/world/iris_arducopter_runway/light_config]
[Msg] Physics service on [/world/iris_arducopter_runway/set_physics]
[Msg] SphericalCoordinates service on [/world/iris_arducopter_runway/set_spherical_coordinates]
[Msg] Enable collision service on [/world/iris_arducopter_runway/enable_collision]
[Msg] Disable collision service on [/world/iris_arducopter_runway/disable_collision]
[Msg] Material service on [/world/iris_arducopter_runway/visual_config]
[Dbg] [SystemManager.cc:49] Loaded system [ignition::gazebo::systems::UserCommands] for entity [1]
[Dbg] [SystemManager.cc:49] Loaded system [ignition::gazebo::systems::SceneBroadcaster] for entity [1]
[Dbg] [SystemManager.cc:49] Loaded system [ignition::gazebo::systems::Imu] for entity [1]
[Dbg] [SystemManager.cc:49] Loaded system [ignition::gazebo::systems::JointStatePublisher] for entity [9]
[Dbg] [SystemManager.cc:49] Loaded system [ignition::gazebo::systems::LiftDrag] for entity [9]
[Dbg] [SystemManager.cc:49] Loaded system [ignition::gazebo::systems::LiftDrag] for entity [9]
[Dbg] [SystemManager.cc:49] Loaded system [ignition::gazebo::systems::LiftDrag] for entity [9]
[Dbg] [SystemManager.cc:49] Loaded system [ignition::gazebo::systems::LiftDrag] for entity [9]
[Dbg] [SystemManager.cc:49] Loaded system [ignition::gazebo::systems::LiftDrag] for entity [9]
[Dbg] [SystemManager.cc:49] Loaded system [ignition::gazebo::systems::LiftDrag] for entity [9]
[Dbg] [SystemManager.cc:49] Loaded system [ignition::gazebo::systems::LiftDrag] for entity [9]
[Dbg] [SystemManager.cc:49] Loaded system [ignition::gazebo::systems::LiftDrag] for entity [9]
[Msg] ApplyJointForce subscribing to Double messages on [/model/iris/joint/rotor_0_joint/cmd_force]
[Dbg] [SystemManager.cc:49] Loaded system [ignition::gazebo::systems::ApplyJointForce] for entity [9]
[Msg] ApplyJointForce subscribing to Double messages on [/model/iris/joint/rotor_1_joint/cmd_force]
[Dbg] [SystemManager.cc:49] Loaded system [ignition::gazebo::systems::ApplyJointForce] for entity [9]
[Msg] ApplyJointForce subscribing to Double messages on [/model/iris/joint/rotor_2_joint/cmd_force]
[Dbg] [SystemManager.cc:49] Loaded system [ignition::gazebo::systems::ApplyJointForce] for entity [9]
[Msg] ApplyJointForce subscribing to Double messages on [/model/iris/joint/rotor_3_joint/cmd_force]
[Dbg] [SystemManager.cc:49] Loaded system [ignition::gazebo::systems::ApplyJointForce] for entity [9]
[Dbg] [SystemManager.cc:49] Loaded system [ArduPilotPlugin] for entity [9]
[Msg] Loaded level [3]
[Msg] Serving world controls on [/world/iris_arducopter_runway/control], [/world/iris_arducopter_runway/control/state] and [/world/iris_arducopter_runway/playback/control]
[Msg] Serving GUI information on [/world/iris_arducopter_runway/gui/info]
[Msg] World [iris_arducopter_runway] initialized with [default_physics] physics profile.
[Msg] Serving world SDF generation service on [/world/iris_arducopter_runway/generate_world_sdf]
[Msg] Serving world names on [/gazebo/worlds]
[Msg] Resource path add service on [/gazebo/resource_paths/add].
[Msg] Resource path get service on [/gazebo/resource_paths/get].
[Msg] Resource paths published on [/gazebo/resource_paths].
[Msg] Server control service on [/server_control].
[GUI] [Wrn] [Application.cc:753] [QT] file:///usr/lib/x86_64-linux-gnu/qt5/qml/QtQuick/Dialogs/DefaultFileDialog.qml:102:33: QML Settings: Failed to initialize QSettings instance. Status code is: 1
[GUI] [Wrn] [Application.cc:753] [QT] file:///usr/lib/x86_64-linux-gnu/qt5/qml/QtQuick/Dialogs/DefaultFileDialog.qml:102:33: QML Settings: The following application identifiers have not been set: QVector("organizationName", "organizationDomain")
[GUI] [Wrn] [Application.cc:753] [QT] file:///usr/lib/x86_64-linux-gnu/qt5/qml/QtQuick/Dialogs/DefaultFileDialog.qml:102:33: QML Settings: Failed to initialize QSettings instance. Status code is: 1
[GUI] [Wrn] [Application.cc:753] [QT] file:///usr/lib/x86_64-linux-gnu/qt5/qml/QtQuick/Dialogs/DefaultFileDialog.qml:102:33: QML Settings: The following application identifiers have not been set: QVector("organizationName", "organizationDomain")
[GUI] [Dbg] [PathManager.cc:66] Requesting resource paths through [/gazebo/resource_paths/get]
[GUI] [Wrn] [Application.cc:753] [QT] file::/Gazebo/GazeboDrawer.qml:147:3: QML Dialog: Binding loop detected for property "implicitHeight"
[GUI] [Wrn] [Application.cc:753] [QT] file:///usr/lib/x86_64-linux-gnu/qt5/qml/QtQuick/Dialogs/DefaultFileDialog.qml:102:33: QML Settings: Failed to initialize QSettings instance. Status code is: 1
[GUI] [Wrn] [Application.cc:753] [QT] file:///usr/lib/x86_64-linux-gnu/qt5/qml/QtQuick/Dialogs/DefaultFileDialog.qml:102:33: QML Settings: The following application identifiers have not been set: QVector("organizationName", "organizationDomain")
[GUI] [Wrn] [Application.cc:753] [QT] file::/Gazebo/GazeboDrawer.qml:147:3: QML Dialog: Binding loop detected for property "implicitHeight"
[GUI] [Dbg] [Gui.cc:156] GUI requesting list of world names. The server may be busy downloading resources. Please be patient.
[GUI] [Dbg] [PathManager.cc:55] Received resource paths.
[GUI] [Dbg] [Gui.cc:215] Requesting GUI from [/world/iris_arducopter_runway/gui/info]...
[GUI] [Dbg] [GuiRunner.cc:145] Requesting initial state from [/world/iris_arducopter_runway/state]...
[GUI] [Msg] Loading config [/home/emr/.ignition/gazebo/6/gui.config]
[GUI] [Dbg] [Application.cc:388] Loading plugin [MinimalScene]
[GUI] [Msg] Added plugin [3D View] to main window
[GUI] [Msg] Loaded plugin [MinimalScene] from path [/usr/lib/x86_64-linux-gnu/ign-gui-6/plugins/libMinimalScene.so]
[GUI] [Dbg] [Application.cc:388] Loading plugin [EntityContextMenuPlugin]
[GUI] [Msg] Added plugin [EntityContextMenu] to main window
[GUI] [Msg] Loaded plugin [EntityContextMenuPlugin] from path [/usr/lib/x86_64-linux-gnu/ign-gazebo-6/plugins/gui/libEntityContextMenuPlugin.so]
[GUI] [Dbg] [Application.cc:388] Loading plugin [GzSceneManager]
[GUI] [Msg] Added plugin [Scene Manager] to main window
[GUI] [Msg] Loaded plugin [GzSceneManager] from path [/usr/lib/x86_64-linux-gnu/ign-gazebo-6/plugins/gui/libGzSceneManager.so]
[GUI] [Dbg] [Application.cc:388] Loading plugin [InteractiveViewControl]
[GUI] [Msg] Camera view controller topic advertised on [/gui/camera/view_control]
[GUI] [Msg] Added plugin [] to main window
[GUI] [Msg] Loaded plugin [InteractiveViewControl] from path [/usr/lib/x86_64-linux-gnu/ign-gui-6/plugins/libInteractiveViewControl.so]
[GUI] [Dbg] [Application.cc:388] Loading plugin [CameraTracking]
[GUI] [Msg] Added plugin [Camera tracking] to main window
[GUI] [Msg] Loaded plugin [CameraTracking] from path [/usr/lib/x86_64-linux-gnu/ign-gui-6/plugins/libCameraTracking.so]
[GUI] [Dbg] [Application.cc:388] Loading plugin [MarkerManager]
[GUI] [Msg] Listening to stats on [/world/iris_arducopter_runway/stats]
[GUI] [Msg] Added plugin [Marker Manager] to main window
[GUI] [Msg] Loaded plugin [MarkerManager] from path [/usr/lib/x86_64-linux-gnu/ign-gui-6/plugins/libMarkerManager.so]
[GUI] [Dbg] [Application.cc:388] Loading plugin [SelectEntities]
[Wrn] [SimulationRunner.cc:656] Found additional publishers on /stats, using namespaced stats topic only
[Dbg] [SimulationRunner.cc:658] Publishers [Address, Message Type]:
[Dbg] [SimulationRunner.cc:663] tcp://192.168.241.131:40007, ignition.msgs.WorldStatistics
[Wrn] [SimulationRunner.cc:689] Found additional publishers on /clock, using namespaced clock topic only
[Dbg] [SimulationRunner.cc:691] Publishers [Address, Message Type]:
[Dbg] [SimulationRunner.cc:696] tcp://192.168.241.131:40007, ignition.msgs.Clock
[Dbg] [SimulationRunner.cc:490] Creating PostUpdate worker threads: 5
[Dbg] [SimulationRunner.cc:501] Creating postupdate worker thread (0)
[Dbg] [SimulationRunner.cc:501] Creating postupdate worker thread (1)
[Dbg] [SimulationRunner.cc:501] Creating postupdate worker thread (2)
[Dbg] [SimulationRunner.cc:501] Creating postupdate worker thread (3)
[Dbg] [ArduPilotPlugin.cc:778] Computed IMU topic to be: world/iris_arducopter_runway/model/iris/link/imu_link/sensor/imu_sensor/imu
[Dbg] [ImuSensor.cc:148] IMU data for [iris::imu_link::imu_sensor] advertised on [world/iris_arducopter_runway/model/iris/link/imu_link/sensor/imu_sensor/imu]
[Msg] Serving scene information on [/world/iris_arducopter_runway/scene/info]
[Msg] Serving graph information on [/world/iris_arducopter_runway/scene/graph]
[Msg] Serving full state on [/world/iris_arducopter_runway/state]
[Msg] Serving full state (async) on [/world/iris_arducopter_runway/state_async]
[Msg] Publishing scene information on [/world/iris_arducopter_runway/scene/info]
[Msg] Publishing entity deletions on [/world/iris_arducopter_runway/scene/deletion]
[Msg] Publishing state changes on [/world/iris_arducopter_runway/state]
[Msg] Publishing pose messages on [/world/iris_arducopter_runway/pose/info]
[Msg] Publishing dynamic pose messages on [/world/iris_arducopter_runway/dynamic_pose/info]
[Dbg] [EntityComponentManager.cc:1571] Updated state thread iterators: 2 threads processing around 19 entities each.
[Wrn] [Component.hh:144] Trying to serialize component with data type [St6vectorIdSaIdEE], which doesn't have `operator<<`. Component will not be serialized.
[Wrn] [Component.hh:144] Trying to serialize component with data type [N3sdf3v125WorldE], which doesn't have `operator<<`. Component will not be serialized.
[Dbg] [EntityComponentManager.cc:1571] Updated state thread iterators: 2 threads processing around 19 entities each.
[GUI] [Msg] Added plugin [Select entities] to main window
[GUI] [Msg] Loaded plugin [SelectEntities] from path [/usr/lib/x86_64-linux-gnu/ign-gazebo-6/plugins/gui/libSelectEntities.so]
[GUI] [Dbg] [Application.cc:388] Loading plugin [Spawn]
[GUI] [Msg] Added plugin [Spawn] to main window
[GUI] [Msg] Loaded plugin [Spawn] from path [/usr/lib/x86_64-linux-gnu/ign-gazebo-6/plugins/gui/libSpawn.so]
[GUI] [Dbg] [Application.cc:388] Loading plugin [VisualizationCapabilities]
[GUI] [Msg] View as transparent service on [/gui/view/transparent]
[GUI] [Msg] View as wireframes service on [/gui/view/wireframes]
[GUI] [Msg] View center of mass service on [/gui/view/com]
[GUI] [Msg] View inertia service on [/gui/view/inertia]
[GUI] [Msg] View collisions service on [/gui/view/collisions]
[GUI] [Msg] View joints service on [/gui/view/joints]
[GUI] [Msg] View frames service on [/gui/view/frames]
[GUI] [Msg] Added plugin [VisualizationCapabilities] to main window
[GUI] [Msg] Loaded plugin [VisualizationCapabilities] from path [/usr/lib/x86_64-linux-gnu/ign-gazebo-6/plugins/gui/libVisualizationCapabilities.so]
[GUI] [Dbg] [Application.cc:388] Loading plugin [WorldControl]
[GUI] [Msg] Using world control service [/world/iris_arducopter_runway/control]
[GUI] [Msg] Listening to stats on [/world/iris_arducopter_runway/stats]
[GUI] [Dbg] [WorldControl.cc:246] Using an event to share WorldControl msgs with the server
[GUI] [Msg] Added plugin [World control] to main window
[GUI] [Msg] Loaded plugin [WorldControl] from path [/usr/lib/x86_64-linux-gnu/ign-gui-6/plugins/libWorldControl.so]
[GUI] [Dbg] [Application.cc:388] Loading plugin [WorldStats]
[GUI] [Msg] Listening to stats on [/world/iris_arducopter_runway/stats]
[GUI] [Msg] Added plugin [World stats] to main window
[GUI] [Msg] Loaded plugin [WorldStats] from path [/usr/lib/x86_64-linux-gnu/ign-gui-6/plugins/libWorldStats.so]
[GUI] [Dbg] [Application.cc:388] Loading plugin [Shapes]
[GUI] [Msg] Added plugin [Shapes] to main window
[GUI] [Msg] Loaded plugin [Shapes] from path [/usr/lib/x86_64-linux-gnu/ign-gazebo-6/plugins/gui/libShapes.so]
[GUI] [Dbg] [Application.cc:388] Loading plugin [Lights]
[GUI] [Msg] Added plugin [Lights] to main window
[GUI] [Msg] Loaded plugin [Lights] from path [/usr/lib/x86_64-linux-gnu/ign-gazebo-6/plugins/gui/libLights.so]
[GUI] [Dbg] [Application.cc:388] Loading plugin [TransformControl]
[GUI] [Dbg] [TransformControl.cc:219] Legacy mode is disabled; this plugin must be used with MinimalScene.
[GUI] [Msg] Added plugin [Transform control] to main window
[GUI] [Msg] Loaded plugin [TransformControl] from path [/usr/lib/x86_64-linux-gnu/ign-gazebo-6/plugins/gui/libTransformControl.so]
[GUI] [Dbg] [Application.cc:388] Loading plugin [Screenshot]
[GUI] [Wrn] [Application.cc:753] [QT] file:///usr/lib/x86_64-linux-gnu/qt5/qml/QtQuick/Dialogs/DefaultFileDialog.qml:102:33: QML Settings: Failed to initialize QSettings instance. Status code is: 1
[GUI] [Wrn] [Application.cc:753] [QT] file:///usr/lib/x86_64-linux-gnu/qt5/qml/QtQuick/Dialogs/DefaultFileDialog.qml:102:33: QML Settings: The following application identifiers have not been set: QVector("organizationName", "organizationDomain")
[GUI] [Msg] Screenshot service on [/gui/screenshot]
[GUI] [Msg] Added plugin [Screenshot] to main window
[GUI] [Msg] Loaded plugin [Screenshot] from path [/usr/lib/x86_64-linux-gnu/ign-gui-6/plugins/libScreenshot.so]
[GUI] [Dbg] [Application.cc:388] Loading plugin [CopyPaste]
[GUI] [Msg] Added plugin [Copy/Paste] to main window
[GUI] [Msg] Loaded plugin [CopyPaste] from path [/usr/lib/x86_64-linux-gnu/ign-gazebo-6/plugins/gui/libCopyPaste.so]
[GUI] [Dbg] [Application.cc:388] Loading plugin [ComponentInspector]
[GUI] [Msg] Added plugin [Component inspector] to main window
[GUI] [Msg] Loaded plugin [ComponentInspector] from path [/usr/lib/x86_64-linux-gnu/ign-gazebo-6/plugins/gui/libComponentInspector.so]
[GUI] [Dbg] [Application.cc:388] Loading plugin [EntityTree]
[GUI] [Wrn] [Application.cc:753] [QT] file:///usr/lib/x86_64-linux-gnu/qt5/qml/QtQuick/Dialogs/DefaultFileDialog.qml:102:33: QML Settings: Failed to initialize QSettings instance. Status code is: 1
[GUI] [Wrn] [Application.cc:753] [QT] file:///usr/lib/x86_64-linux-gnu/qt5/qml/QtQuick/Dialogs/DefaultFileDialog.qml:102:33: QML Settings: The following application identifiers have not been set: QVector("organizationName", "organizationDomain")
[GUI] [Wrn] [Application.cc:753] [QT] file::/EntityTree/EntityTree.qml:148:7: QML ToolButton: Detected anchors on an item that is managed by a layout. This is undefined behavior; use Layout.alignment instead.
[GUI] [Msg] Added plugin [Entity tree] to main window
[GUI] [Msg] Loaded plugin [EntityTree] from path [/usr/lib/x86_64-linux-gnu/ign-gazebo-6/plugins/gui/libEntityTree.so]
[GUI] [Dbg] [Application.cc:264] Loading window config
[GUI] [Msg] Using server control service [/server_control]
[GUI] [Dbg] [Application.cc:525] Applying config
[GUI] [Wrn] [Component.hh:189] Trying to deserialize component with data type [St6vectorIdSaIdEE], which doesn't have `operator>>`. Component will not be deserialized.
[GUI] [Wrn] [Component.hh:189] Trying to deserialize component with data type [N3sdf3v125WorldE], which doesn't have `operator>>`. Component will not be deserialized.
[GUI] [Wrn] [Application.cc:753] [QT] file::/Gazebo/GazeboDrawer.qml:147:3: QML Dialog: Binding loop detected for property "implicitHeight"
[GUI] [Msg] Loading plugin [ignition-rendering-ogre2]
[GUI] [Dbg] [MinimalScene.cc:534] Create scene [scene]
[GUI] [Msg] Loading plugin [ignition-rendering-ogre2]
[GUI] [Dbg] [TransformControl.cc:528] TransformControl plugin is using camera [scene::Camera(65527)]
[GUI] [Msg] Loading plugin [ignition-rendering-ogre2]
[GUI] [Msg] Loading plugin [ignition-rendering-ogre2]
[GUI] [Dbg] [Spawn.cc:318] Spawn plugin is using camera [scene::Camera(65527)]
[GUI] [Msg] Loading plugin [ignition-rendering-ogre2]
[GUI] [Dbg] [SelectEntities.cc:449] SelectEntities plugin is using camera [scene::Camera(65527)]
[GUI] [Msg] Loading plugin [ignition-rendering-ogre2]
[GUI] [Dbg] [MarkerManager.cc:171] Advertise /marker/list service.
[GUI] [Dbg] [MarkerManager.cc:181] Advertise /marker/list.
[GUI] [Dbg] [MarkerManager.cc:191] Advertise /marker_array.
[GUI] [Msg] Loading plugin [ignition-rendering-ogre2]
[GUI] [Dbg] [CameraTracking.cc:181] CameraTrackingPrivate plugin is moving camera [scene::Camera(65527)]
[GUI] [Msg] Move to service on [/gui/move_to]
[GUI] [Msg] Follow service on [/gui/follow]
[GUI] [Msg] Move to pose service on [/gui/move_to/pose]
[GUI] [Msg] Camera pose topic advertised on [/gui/camera/pose]
[GUI] [Msg] Follow offset service on [/gui/follow/offset]
[GUI] [Msg] Loading plugin [ignition-rendering-ogre2]
[GUI] [Dbg] [InteractiveViewControl.cc:130] InteractiveViewControl plugin is moving camera [scene::Camera(65527)]
[GUI] [Msg] Loading plugin [ignition-rendering-ogre2]
[GUI] [Msg] Loading plugin [ignition-rendering-ogre2]
[GUI] [Dbg] [EntityContextMenuPlugin.cc:79] Entity context menu plugin is using camera [scene::Camera(65527)]
Hi @emir, I didn’t appreciate that you were running Ubuntu on a VM. The black screen is caused because the VM does not support a new enough version of OpenGL to run Ignition. As of Ignition Fortress the machine (virtual or otherwise) must support OpenGL 4.3+ when using the ogre2 render engine which is the default. This caused similar problems for me, I can no longer run Ignition on VM Fusion hosted on macOS.
There’s currently no workaround unfortunately. If you are running macOS you can run the latest version of Ignition natively as there are patches that support Metal.
Hi @rhys, I fixed my problem with using ogre1, is there any problem using ignition gazebo with ogre1?
My main OS is windows 10, I am trying to setup ignition binary on windows but docs are not clear to me.
I dont know that which ignition library to install from this link and what to do after installation. Also in this link, there is no windows installation guide and its really complicated to me.
If you recommend ignition-gazebo with ogre1, I will continue in that way.
I have not tried installing Ignition Gazebo on Windows - I suspect it is still not fully supported (the non-rendering libraries may work, but full GUI support is a WIP).
You can use the ogre (1) render engine, however many of the models now use physically based rendering (PBR) and these need ogre2. A number of the sensors modules are ogre2 only as well, for similar reasons to do with then using more advanced render techniques.
In short, Ignition - like ROS2 is primarily a linux based system at present unless you are an expert and willing to put in a lot of time to get everything working. I think this may change over time as accelerated GUI support for WSL2 improves and people on other platforms catch up.
I implemented the support for Metal in Ignition, because I develop on macOS and wanted a working ROS / ROS2 / Gazebo11 / Ignition environment for that platform, but it comes at a cost.
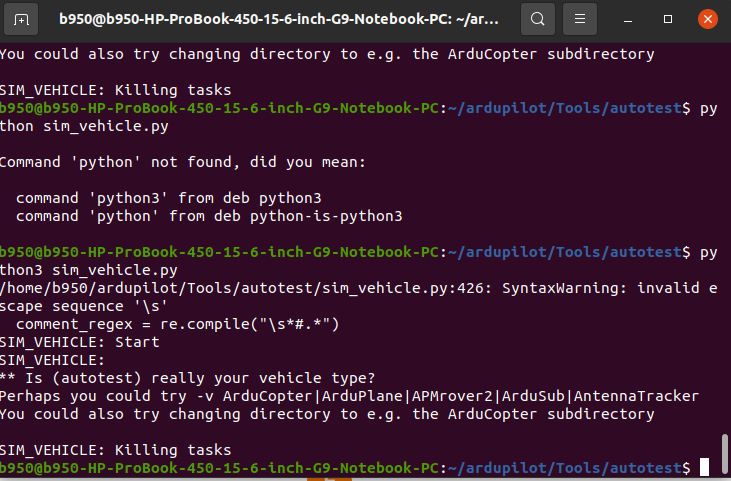
Hello @WAR4ING, it’s better to post commands as text rather than as a screen shot as this makes it clearer and easier to replicate.
In your case you are not calling sim_vehicle.py properly. I’d recommend working through the SITL section in the ArduPilot wiki: Using SITL — Dev documentation