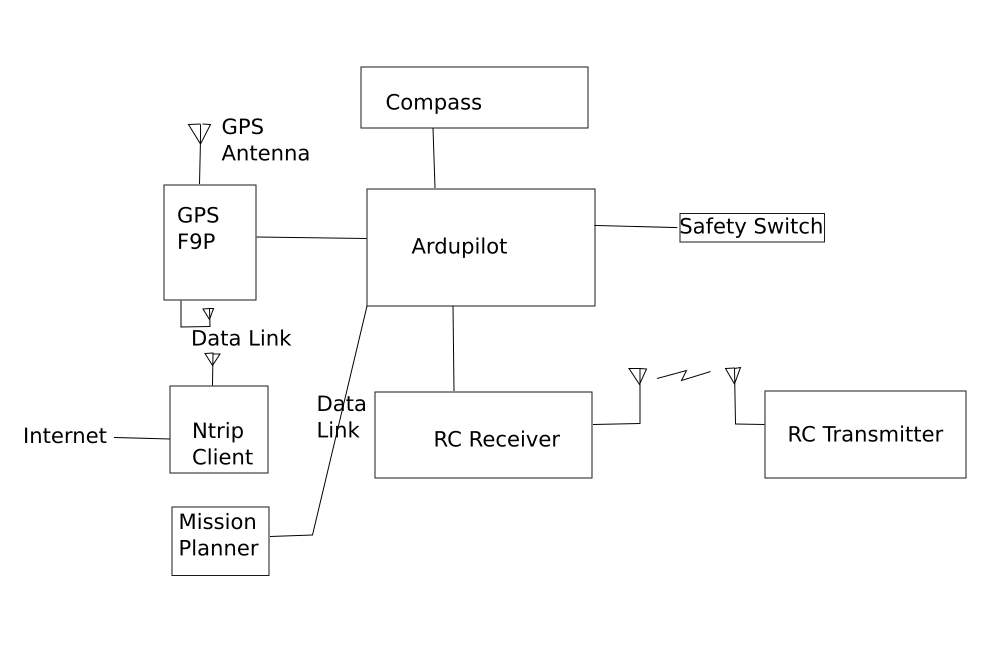
There are probably lots of different ways to do this but trying to narrow down my options. I put together this block diagram showing what I think are the interconnections and radio links and would like feedback/suggestions on corrections/improvements. Need range of about 1000 ft and site is open with only a few trees so little to block radio link signals. Could put a raspberry pi on board but not sure I need it. It would allow a cheaper GPS module but the f9P has such good reviews that seems like a better plan. Can I use one radio link for both gps corrections and mission planner (and anything else that I should have but haven’t considered)? (I showed the mission planner connection as a solid line but this needs to be a radio link of course) Is wifi a reasonable option?
Yes you can share the telemetry link for telemetry and NTRIP RTCM corrections
How would the interconnections be? Does the telemetry link go to the Ardupilot board which then passes the corrections to the GPS?