Hi Everyone,
I’m working on running ‘ArduPilot Quadplane SITL’ with a ‘VTOL model using X-Plane 11/12’. My goal is to use ArduPilot SITL with a custom VTOL model that incorporates X-Plane’s physics. To start, I first tested the setup with the existing Beta-Alia model in X-Plane 12, which is already compatible with ArduPilot SITL. This approach allows me to learn from the current setup and apply those insights to achieve my objective.
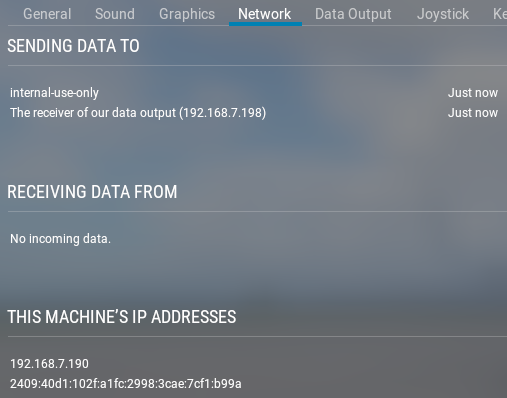
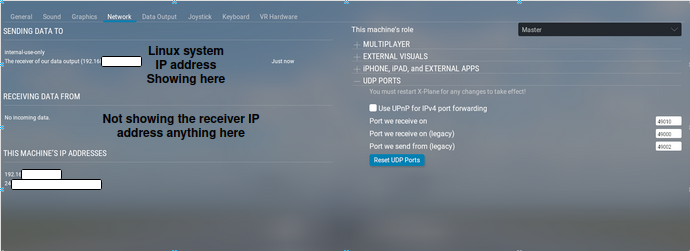
I followed @tridge video ArduPilot with XPlane12, flying the Alia , which demonstrates the process but lacks detailed initial steps for establishing the connection. I’ve used the default Alia model in X-Plane 12, built the code on my Linux system, provided the IP address, and used the xplane_plane.json file referenced in the demo and found in the ArduPilot examples tab. While the connection has been established and data communication is occurring (e.g., I can see Altitude and Attitude data), nothing appears in the X-Plane settings/Network/RECEIVE DATA FROM section, where it should show the port number of the system receiving the data.
I’m attaching a few screenshots to illustrate the connection status; these should serve as a reference for what I’m trying to explain.
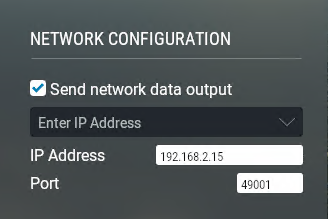
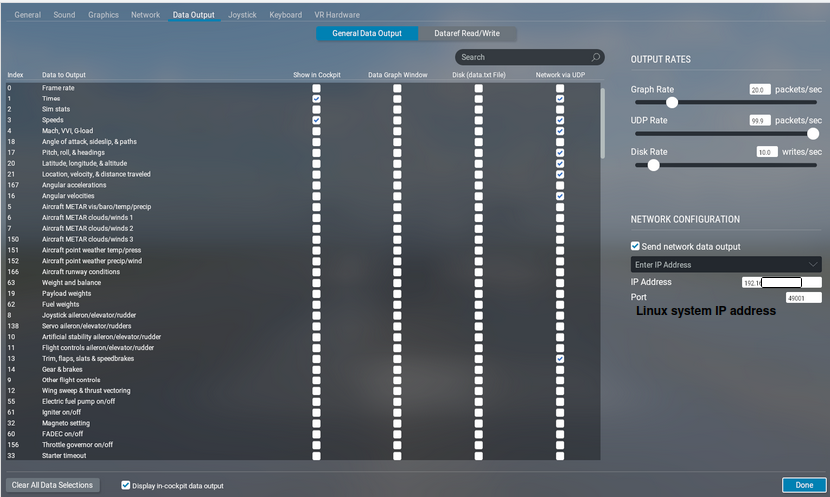
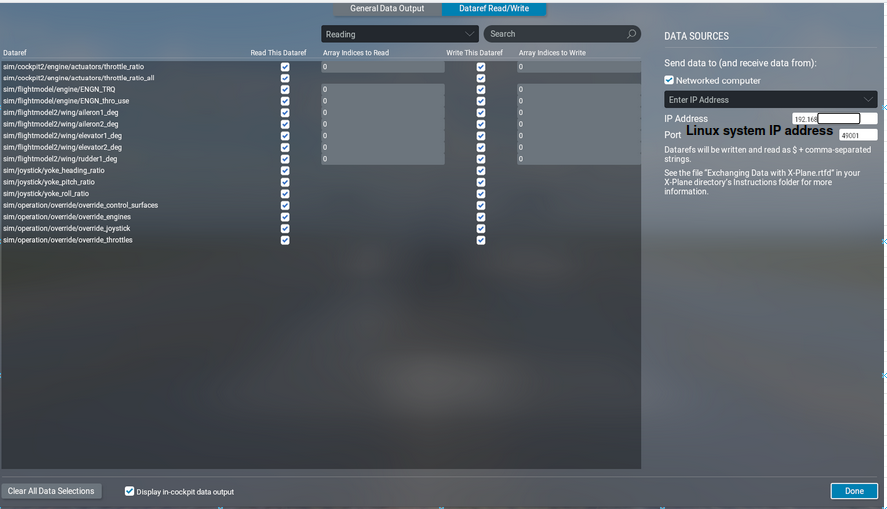
Enabled DataRef and given output IP address
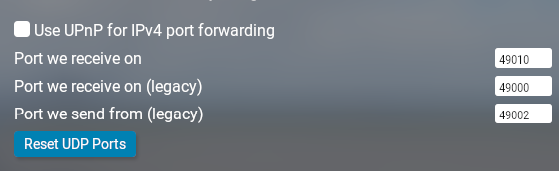
X-Plane network Tab showing the connection Status
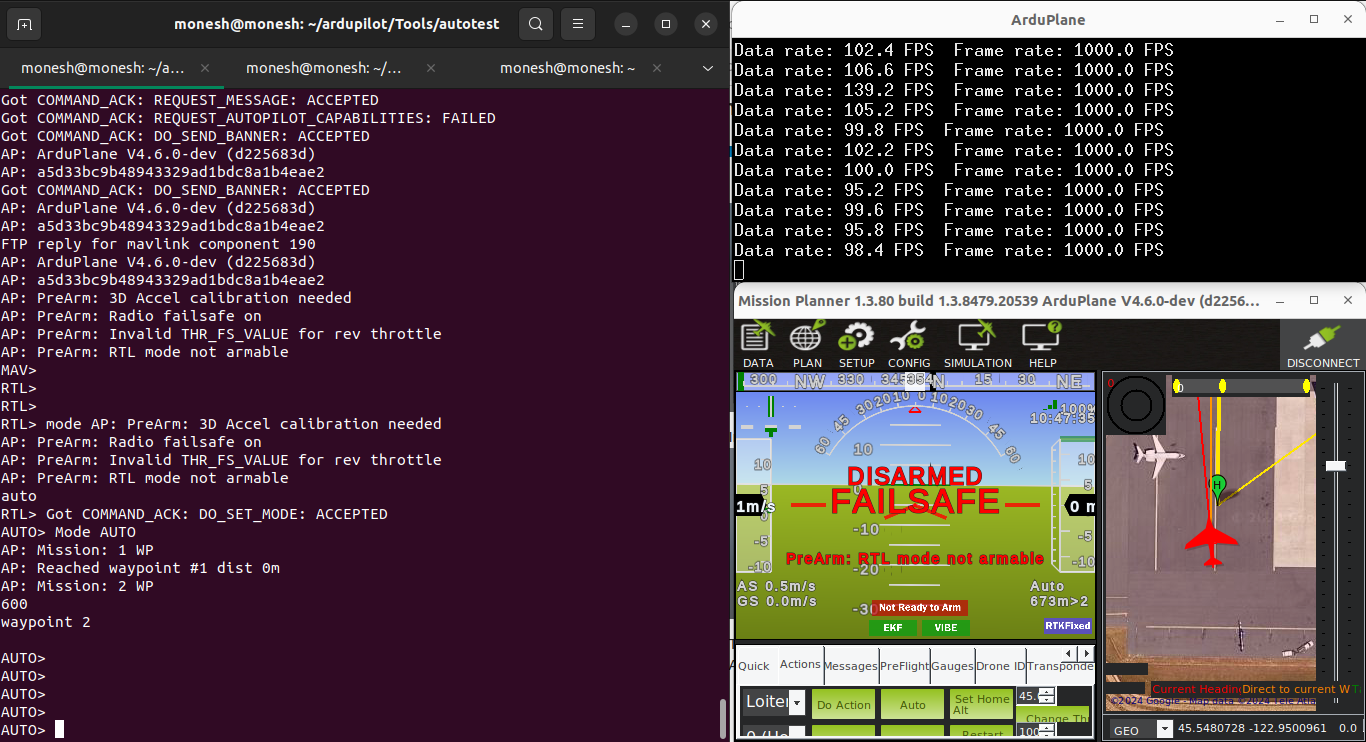
Linux terminal running the code using command (sim_vehicle.py -v ArduPlane -f xplane --sim-address )
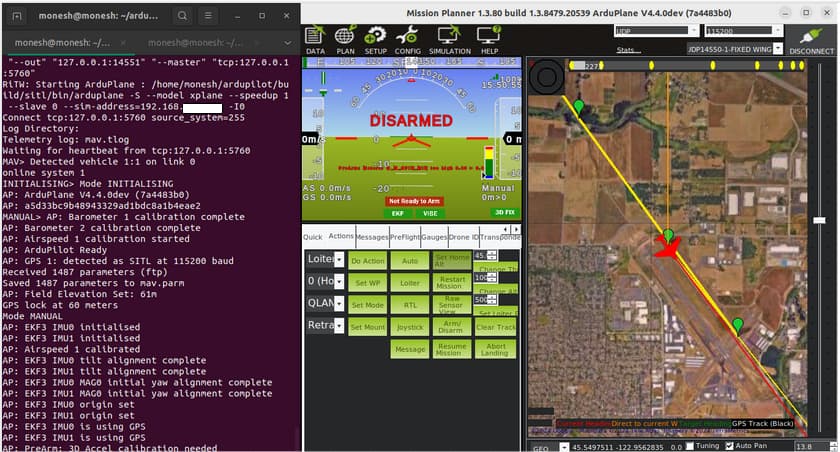
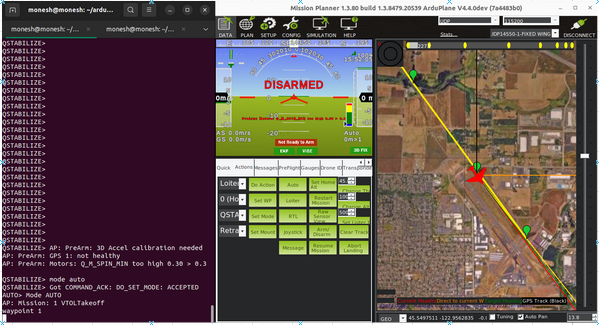
Mode changes and data from X-Plane are being updated.
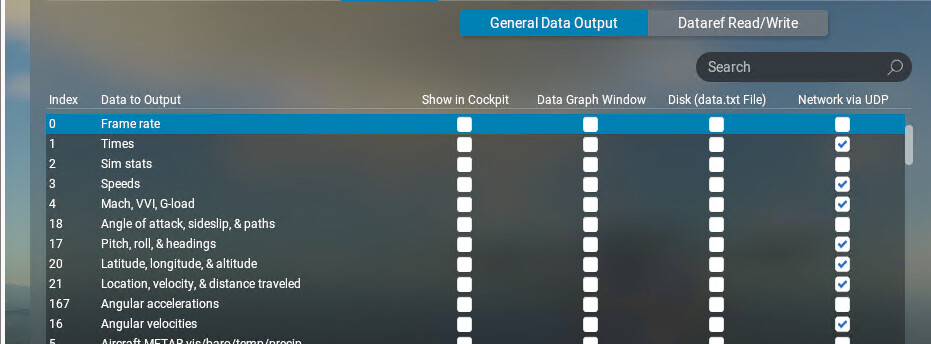
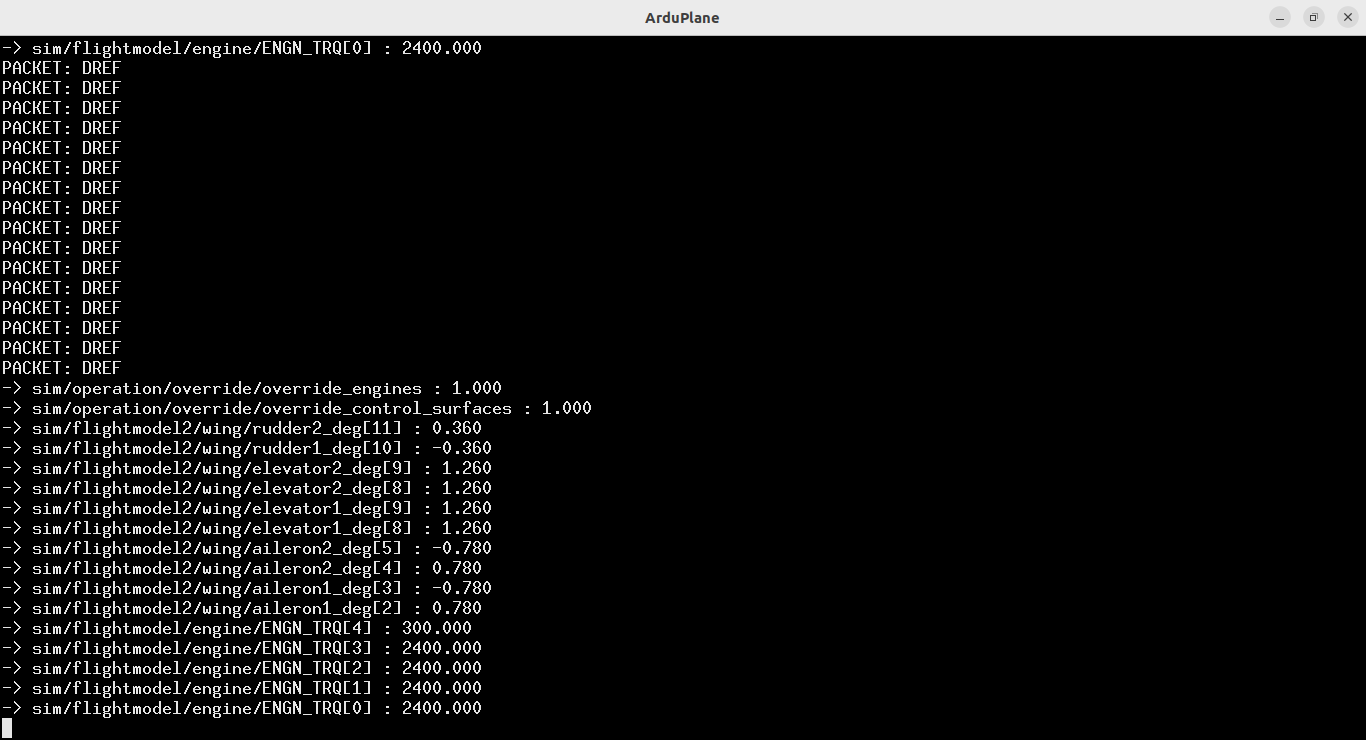
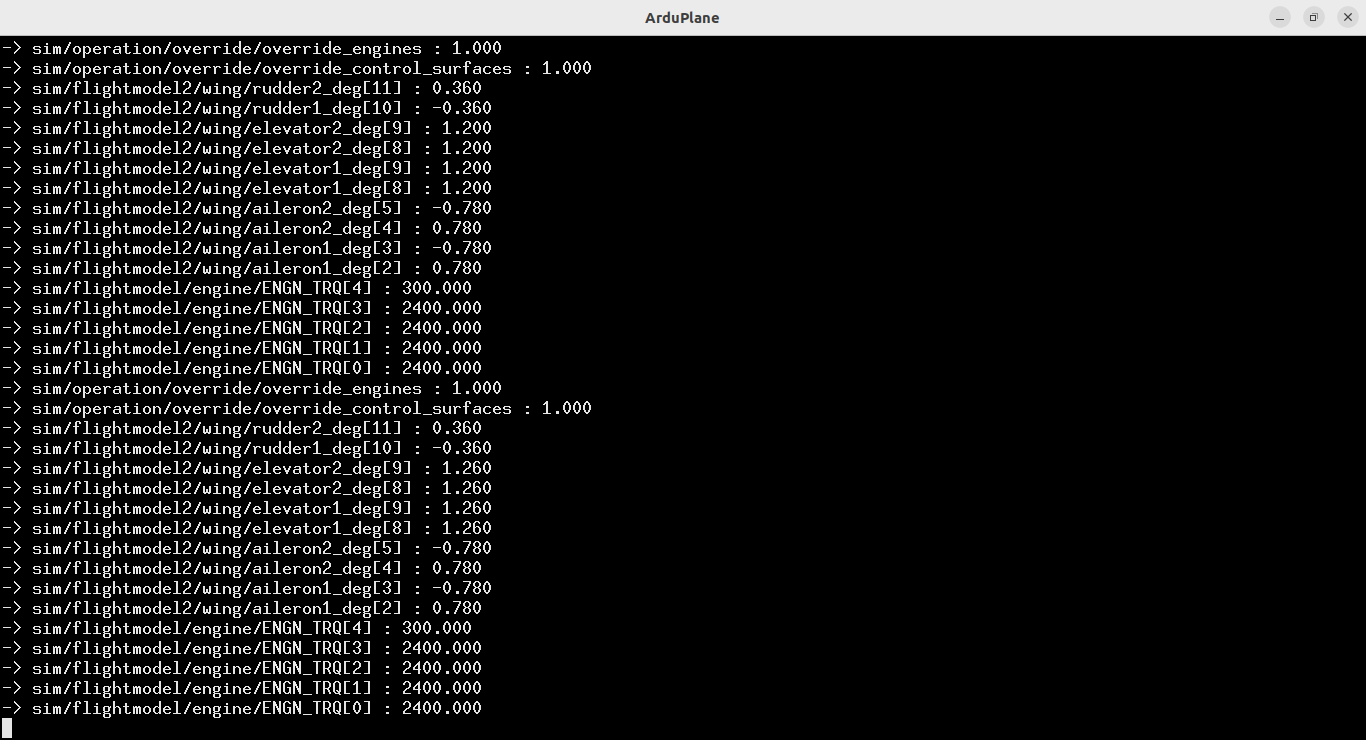
With DataRef Debug enabled, I can see the data that is being transmitted.
When I run SITL from the MissionPlanner Simulation tab, it successfully connects and displays the IP address in the X-Plane settings/Network/RECEIVE DATA FROM section.
In both cases mentioned, I am unable to run the auto mission. Despite planning the auto mission, the X-Plane model neither reacts nor follows the mission. I’m unsure what might be going wrong. Is there something additional that needs to be done to execute the auto mission, aside from manual flying with the joystick connected to X-Plane?
I also tried the same with a custom VTOL model in X-Plane 11, but had no success.
ArduPlane Version: 4.4.0, 4.5.5 (Stable)
X-Plane Version: 11 (Licensed), 12 (Demo)
I’ve tried all possible permutations and combinations.
Could someone please assist me with this issue? Additionally, if possible, could you provide any relevant files, such as the X-Plane SITL parameter file for the Beta-Alia?
@tridge @peterbarker @amilcarlucas @Albcem @Gary_Mortimer @iampete @rmackay9 @Georacer @nhadrian
Please let me know if I’ve missed any details that could assist you in addressing this issue. I would greatly appreciate any guidance you can provide, as your help would be extremely valuable.
Thanks & Regards,
Monesh Pasupureddy