Hello.
Today we had a unexpected and unfortunate crash while flying our quadplane. We did hover test and a simple waypoint mission which it did great job. But on the third run, while programmed to do a waypoint mission it crashed before reaching the second waypoint. Could anybody help me review the logs and narrow down or even find the cause of the crash?
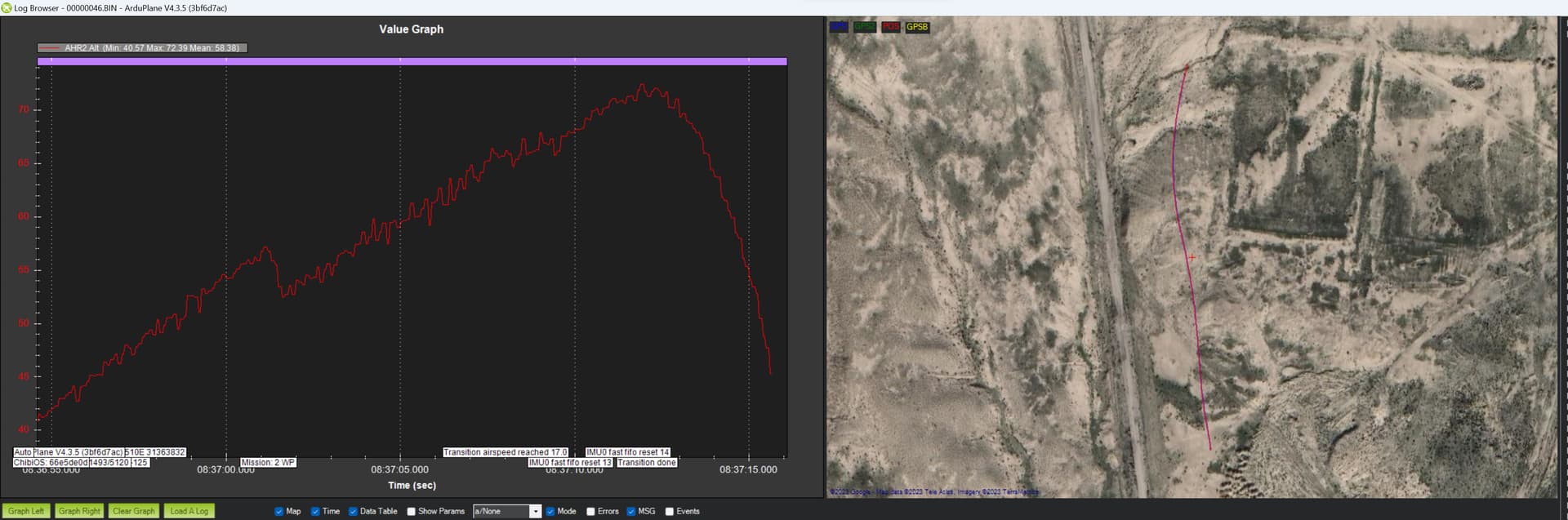
Just briefly looking at the logs - it looks like you reached transition done and then your altitude immediately started descending. Before I go further - wanted to ask if you guys have successfully transitioned before or not?
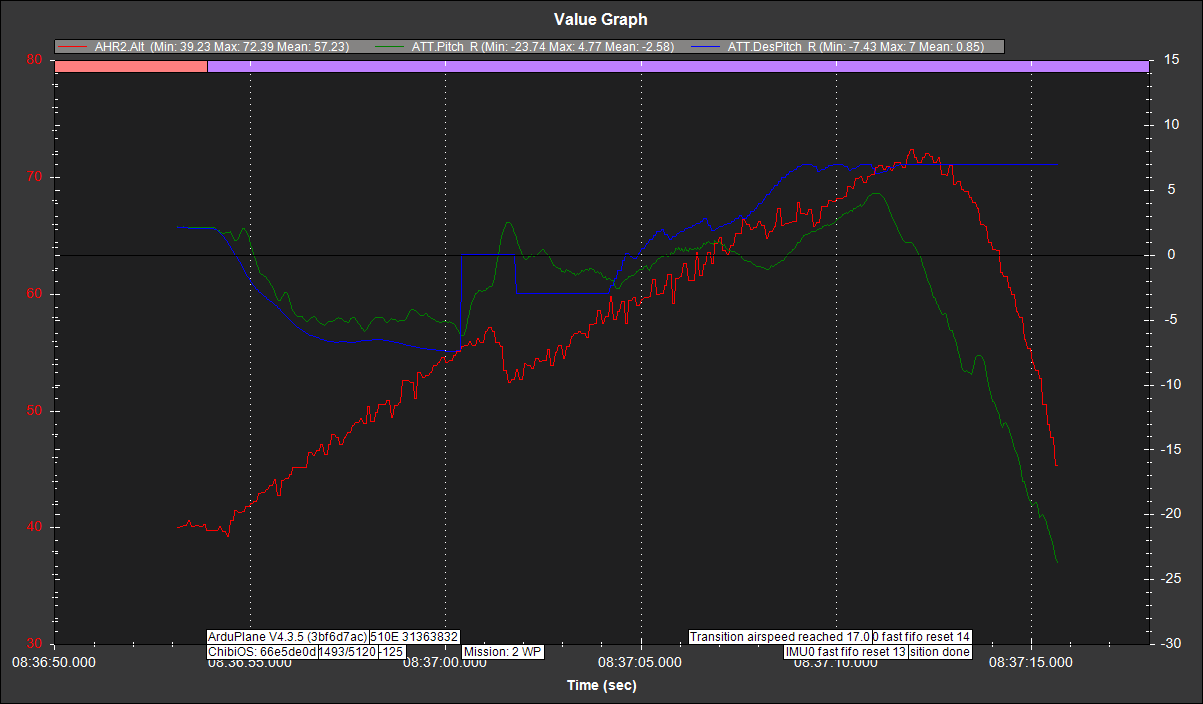
Looking at your RC_OUT.10 (elevator), it seems like your elevator was responding correctly to the request to pitch up, and we can see more elevator being applied as the (presumably) I term kicks in.
This (to me) points to control surface failure or to a stall.
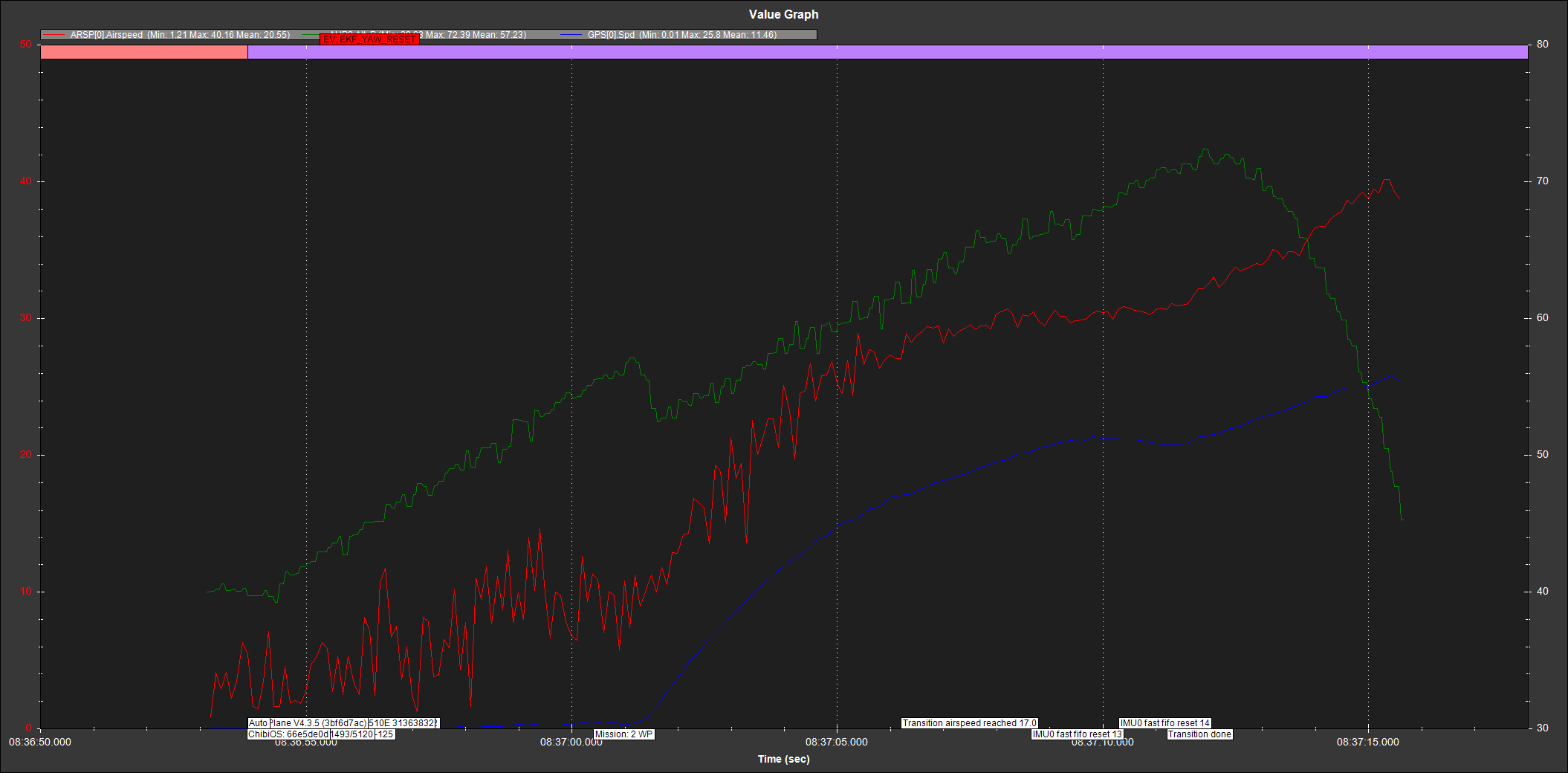
Graphing the airspeed seems to point towards the former, since your airspeed and GPS estimated speed are both climbing or maintained during the leadup to the crash.
If you haven’t run tuning for stabilized flight modes yet, I would suggest taking the control surface, and deflecting the servo to the maximum output reached (around 1700us it seems), and seeing how much control surface deflection there is. This is because the default response in stabilized flight modes for a fixed wing are tuned for small aircraft and can be quite slow / laggy on larger aircraft like quadplanes.
Again, I don’t know what testing you have done so far, but that would be the first place I start. If you’ve already done that, then we can continue to investigate other causes.
or he has his control surfaces setup with the wrong directions…it appears that they exacerbate the rollover and nose dive once fixed wing controllers take over after transitions complete…the most likely cause of instant crash after a transition…
Yes, we had a number of successfull transitions. Even one 10 to 15 minutes before prior to this mission.
We haven’t had run tuning for the stabilized modes. As it came from manufacturer rtf.
The only parameter or setting that had been changed was to lower the pitch limit to 7 degrees from 10 to lower the current draw while loiter_to_alt waypoints. Other than that nothing has been changed.