I am trying to port arducopter to parrot mambo. The toolchain I used is downloaded from here. I modify parrot bebop code for mambo. My branch is here. The way to build and run is just like bebop. For bluetooth PAN connection, I use education firmware from parrot-developers.
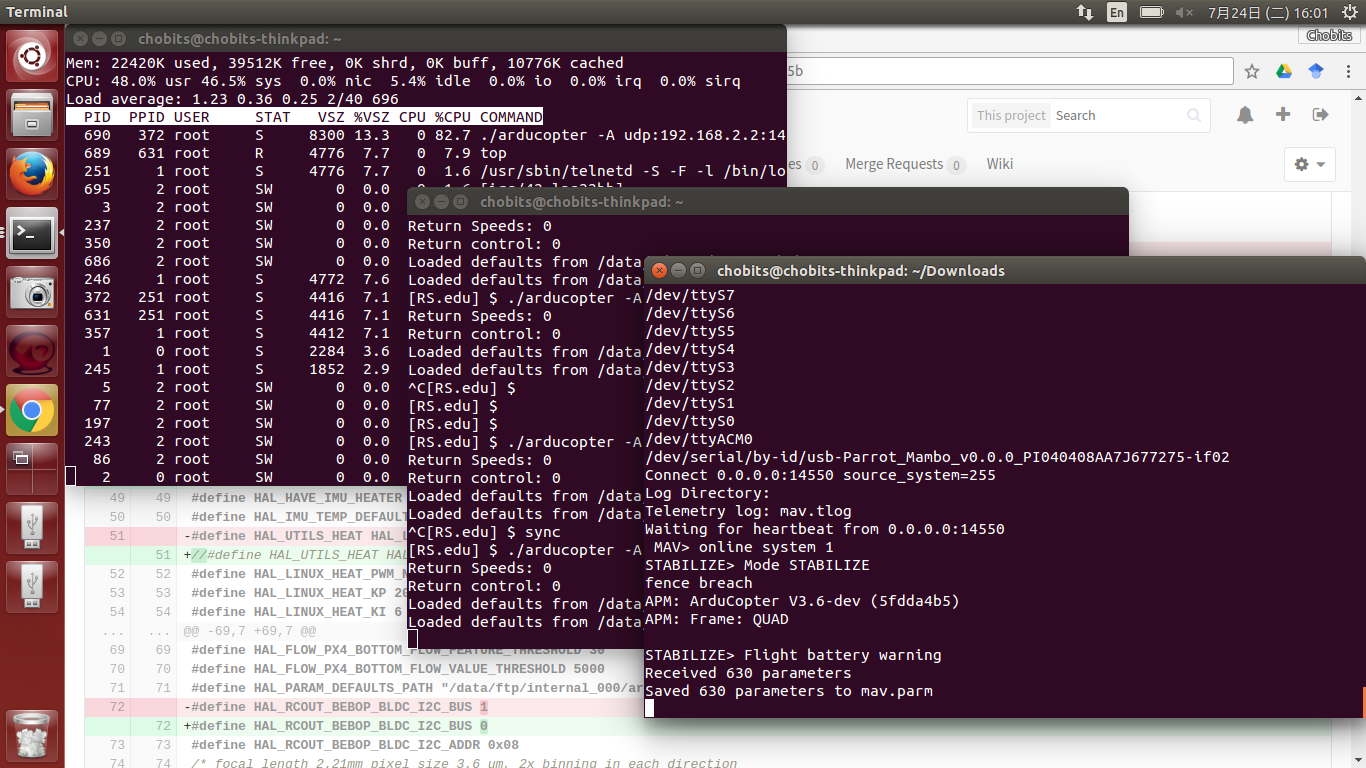
Currently, I can build and run arducopter on mambo. I can arm throttle from usb serial using mavproxy. The motors will spin. I can telnet to mambo through bluetooth PAN. But after I start arducopter (from usb serial) , bluetooth connection is hang. If I abort arducopter, bluetooth is back. It seems like arducopter use too much CPU resources and linux can not spare time for bluetooth service. I have disable most features but still not working. Is there anything I can do to reduce CPU usage? Or there is something I miss?
hi @chobitsfan, these are really great results.
One question: does the mambo utilize the onboard optical flow camera 0.3MP, or is the steering done using only an external system tracking the position of the drone?
In both cases: it looks great!
PS: would it be difficult to port the code for parrot swing for outdoor flying? Mambo and Swing have almost identical hardware systems, except that Swing is a tailsitter plane. Cheers!
Hi. I’m trying to copy what you’ve done and fly mambo with ardupilot. Could you please provide bit more detailed instructions you’ve written at https://github.com/ArduPilot/ardupilot/pull/9142 ?
I’m not familiar with flashing drone and ftp file transfer.
I’m also trying to copy this - I’ve gotten the custom bluetooth firmware you mentioned installed, but do you have any more info on where to go from here? I’m relatively new in general to the Ardu[Pilot|Copter] development area in general but willing to learn!