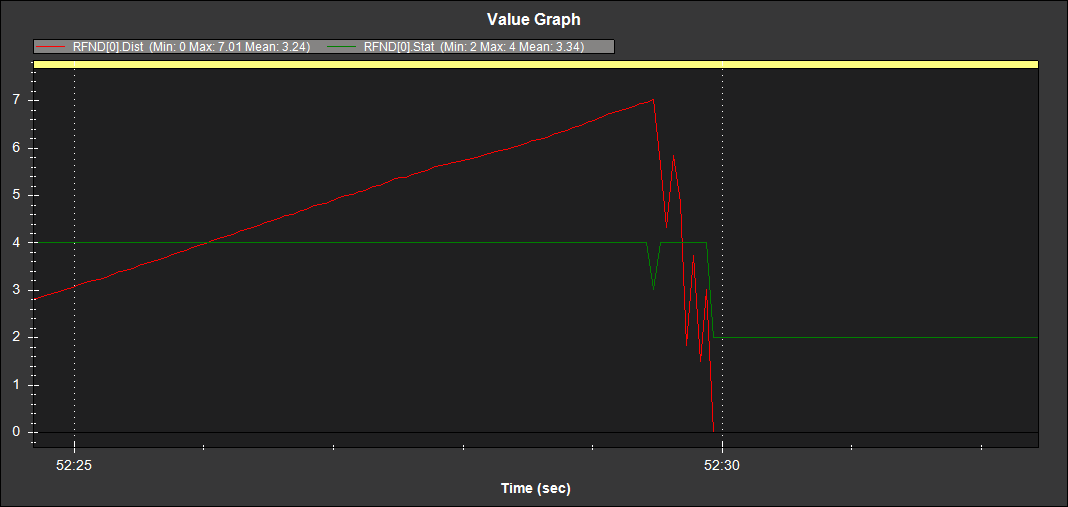
In video, you can see rangefinder bug issue, LIDAR is set for 7m,
As you can see when UAV crosses the border of 7 meters it rapidly goes up. The same situation is when UAV goes down. In first, it goes slightly down and when LiDAR reach 7m it goes rapidly down. It is really dangerous behavior. It happens for different settings and softwares ( arducopter 4.2 and 4.3) We use different LIDAR settings.
Lidar is TFMINIplus. We have 3 different copters with this lidar and always is same behavior, even if we set RNGFND1_MAX_CM to 2 or 5m. This particular lidar read values above 7m. We set max_cm to 7m and EK3_RNG_USE_HGT to 70%.
and how about descent - copter is almost crashed because at 7m it change descent rate from 0,5m/s to 2m/s without throttle change.
We set rangefinder limit to 4m, and it doesn’t change anything for our problem. Drone still goes up and down rapidly when cross border of 4m.
We set EK3_RNG_USE_HGT to -1 ( it doesn’t change anything for drone behavior)
Then what should we to find solution for this case?
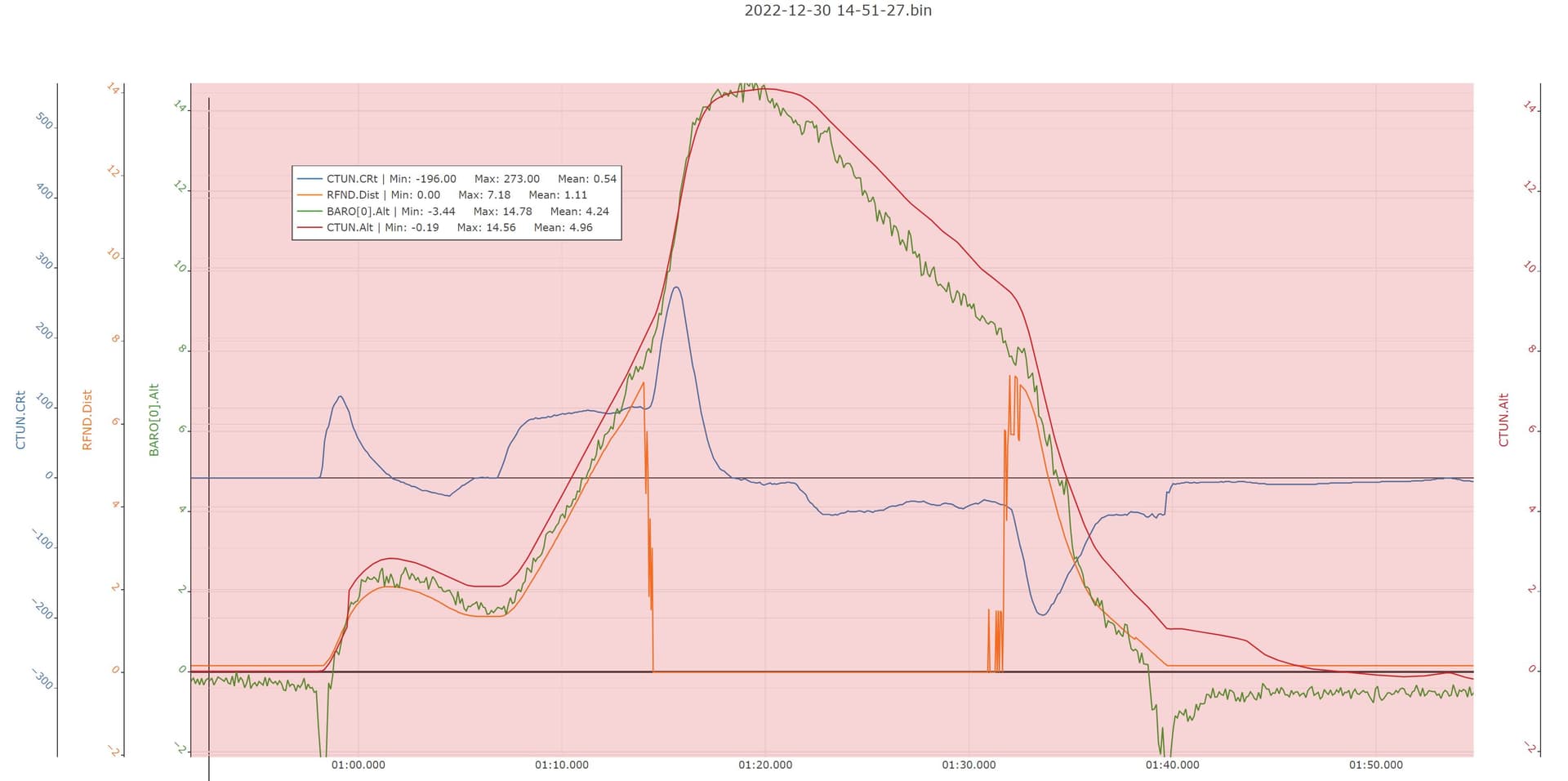
And second question: In most of points we can read altitude value for different parameter for example: ( CTUN ALT - 2.0m, RFN_ALT - 1.75, BARO_ALT - 2.6m) Than which altitude is use for landing and why there is so much fluctuation?
Txs for the log. Thanks for changing EK3_RNG_USE_HGT back to -1.
Leonard and I had a look at the log and as @iampete has said, the issue appears to be that the lidar is reporting some lower altitudes just before it goes bad. The TFmini’s serial protocol is missing some checks that other benewake lidar have (e.g. the TF02 has a “signal reliability” value) making it a bit more difficult for the driver to know if it is getting good altitudes.
Could you try reducing RNGFND1_MAX_CM to 300 (e.g. 3m)? We think this will resolve the issue.