I live in Shenzhen China and want to get started using Ardupilot. I have experience flying DJI Phantom and Inspire 2 drones but I want to build a ArduBoat. Any reccomendations on the best brand to use within China? I’m looking for the following:
Hi Alex,
Just have a general advise to use brands/products you can get on taobao.com, unless you absolutely desire something that has to be imported and go through customs. Although a lot of Chinese manufacturers may sell on amazon, banggood etc, they often are unable to ship within china. Luckily there are a lot available on taobao.
B t w what is a RTU boat?
Hello Karla,
Thanks! I have been searching on Taobao. Just confused about compatability of hardware and exactly I need to get started. Also not sure what Telemetry radio is used in China. RTU boat is (ready to use). I work for a golf course here and I want to build a Arduboat, set waypoints in our irrigaiton lakes to measure the water holding capacity using a Deeper sonar device.
Golf course in SZ, now that’s cool
and you want to find out/monitor the volume of irrigation water.
Yes, I have some experience but that is a sailboat. I modified a RC Laser and did some tests with the amazing developers here at Ardupilot for Wing sails. Here is the latest post I did last year.
Not relevant to your project. However, I can give you my ten cents of experience here:
This is also still confusing to me as well. When searching for the frequency bands allowed for hobbyists around the world, sources like ITU you can learn things like 900 MHz for US and AUS and 433Hhz for EU. But I have not seen China mentioned in any of these list. So digging a bit deeper of the China frequency bands and their usage, I have found (right or wrong) both 900 and 433 bands pretty harmless to use. used for garage opening applications etc. I have also found that that the 900 bands are much more noisy than 433, so I mainly use 433 in my planes and helis. However the boat you see above use a pair of RFD 900x from jdrones. If they had a unit at 433 MHz I would use them all over but they don’t.
If any one here can enlighten us about what RF band is okay to use - please do
Lastly about what RTU boat to use, search the forums for Mapping a lake … for ideas.
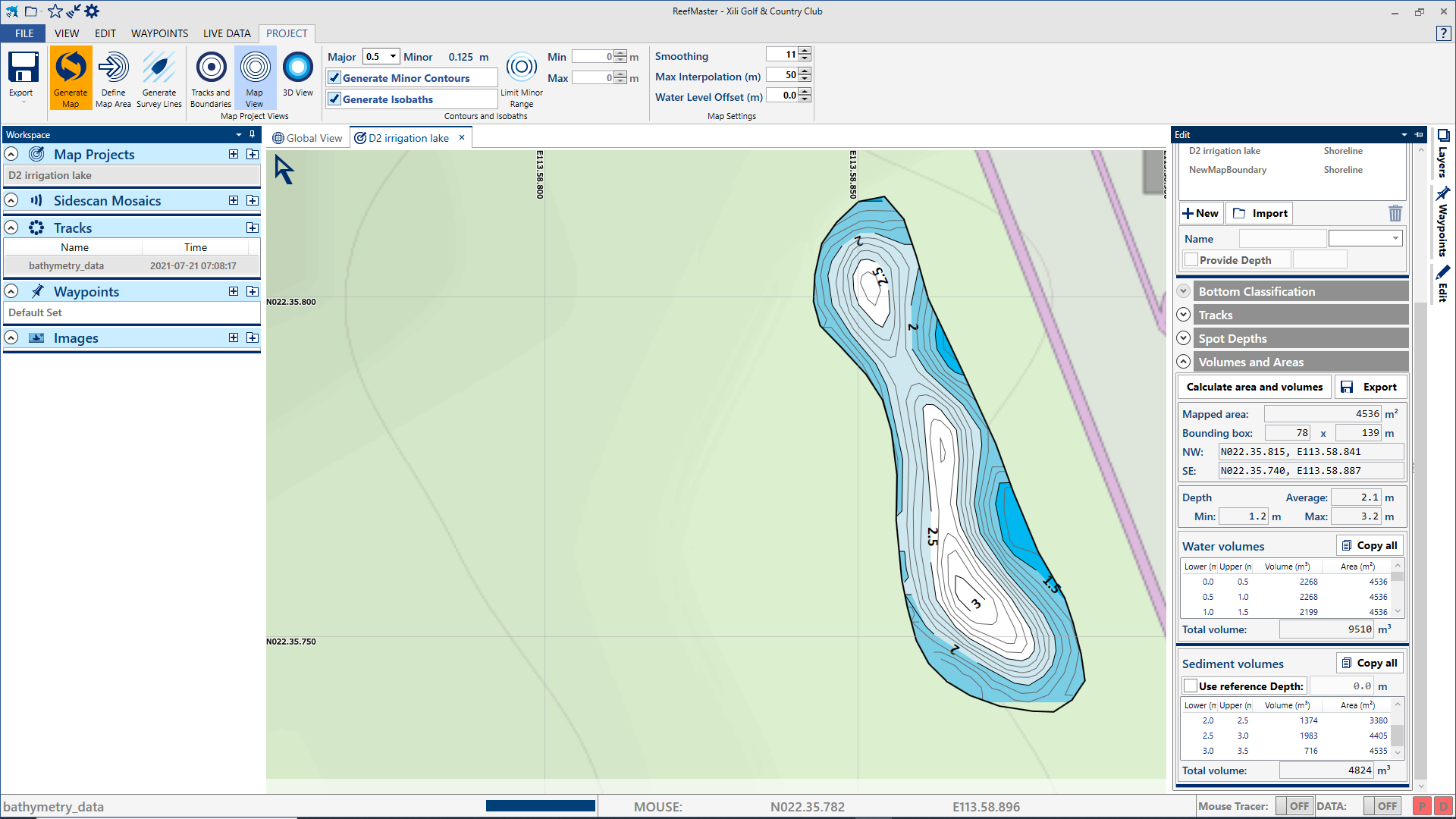
Very interesting! Yes, we are trying to estimate our water holding capacity in the event of drought. We were very dry this year and almost ran out of water. I will use the Deeper sonar, export the CSV data to Reefmaster software to determain water volume of each lake/pond. The data will also be useful in determaining what lakes/ponds need to be dredged. I could technically do this manually with a RC boat but I really want to build an ArduBoat. Ill buy some hardware today and get started.
I was hoping someone more knowledgable than me would stop by and answer you.
GPS is always listening and if your receiver is also just listening and not used for two way telemetry, then I think having the antennas close is no issue.
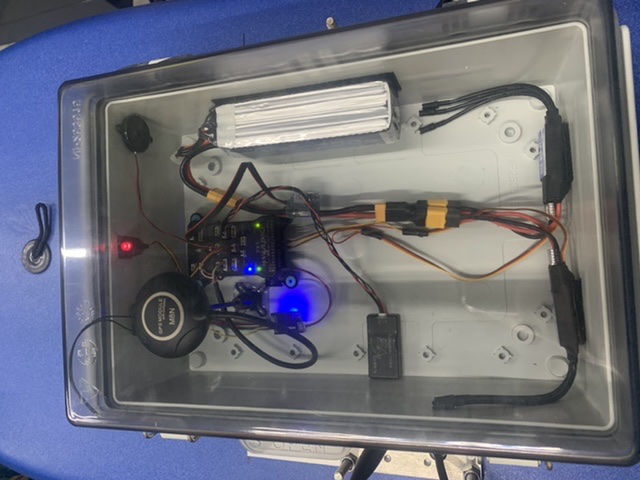
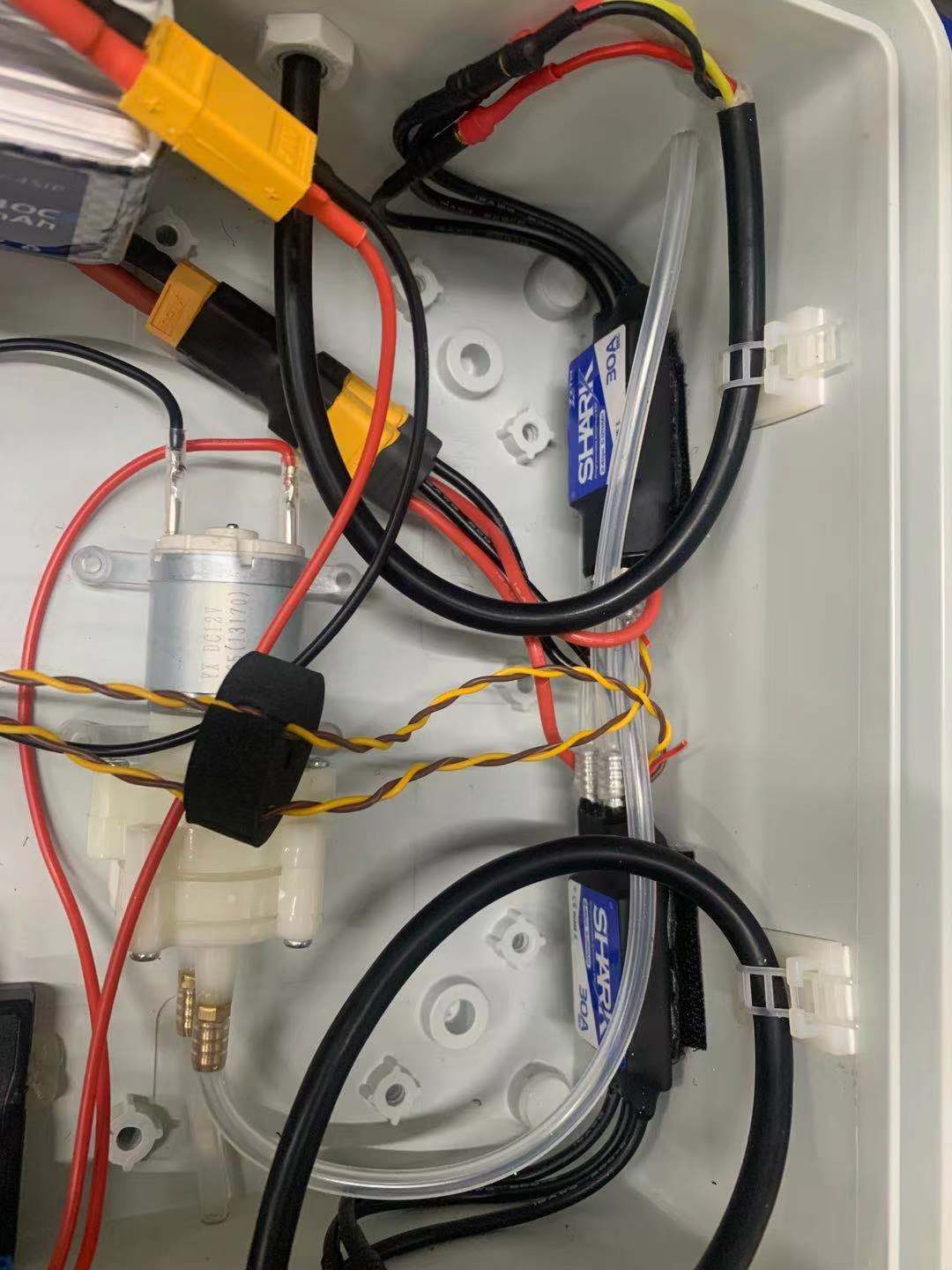
Update: I have installed the deeper sonar inside of the boogie board. I have also added water cooling for the ESCs. the cooling pump relay wasnt working through the pixhawk so I connected it directly to channel 8 of the receiver. the problem Im having now is that the when i turn on the pump it quickly turns off. Also when the pump is on my motors will sporadically spin. thought it must be interference with the signal wires so I twisted the signal and grounds together and tried to create some separation but that didnt help. Maybe I need to add some ferrite beads.