I received the C-RTK differential GPS component from CUAV yesterday, and quickly installed it on my Alzrc 420 RC helicopter. The helicopter was also the last tested CUAV v5 developer version FC, I updated to the latest CUAV development. The user version is dedicated to FW. Then, after a simple setup, the RTK can be positioned smoothly. The MPD shows rtk fixed on the HUD, and then I conduct a simple test flight.
In the actual test flight, it was found that the so-called centimeter-level accuracy is not reflected. The fixed-point effect in the Loiter mode is not much different from that of the single M8n. The flight control parameters of this helicopter have been ideal, but in fact, the fixed-point effect after the RTK is not expected to be good, is it wrong with my parameters? I hope to get a few pointers, thank you!
Actually, I think this is going to be normal for hovering. The centimeter accuracy only refers to GPS drift, which normal GPS is +/- 2 meters on a good day. Using ground-based differential correction improves pass to pass accuracy. So the centimeter-level that people expect is somewhat of a misnomer.
We use the Flightek system in 802’s, as demonstrated here with an 802 planting wheat
This is a $120,000 system and uses ground-based differential correction to get the pass-to-pass accuracy required to prevent overlap or skips. Normal consumer-grade GPS systems aren’t good enough for this type of work. But to expect a stationary consumer-grade unit to be accurate within 1cm is not going to happen. We use subscription (paid) RTK network services in full size application aircraft, and at best all you’ll have for your consumer-grade system is maybe a rover or single ground-placed correction transmitter. So there’s some very clever marketing going on in consumer RTK GNSS systems touting the ultimate accuracy you can get with a professional-grade system. But without a real RTK network you’re not going to get any better than you do with a regular GPS.
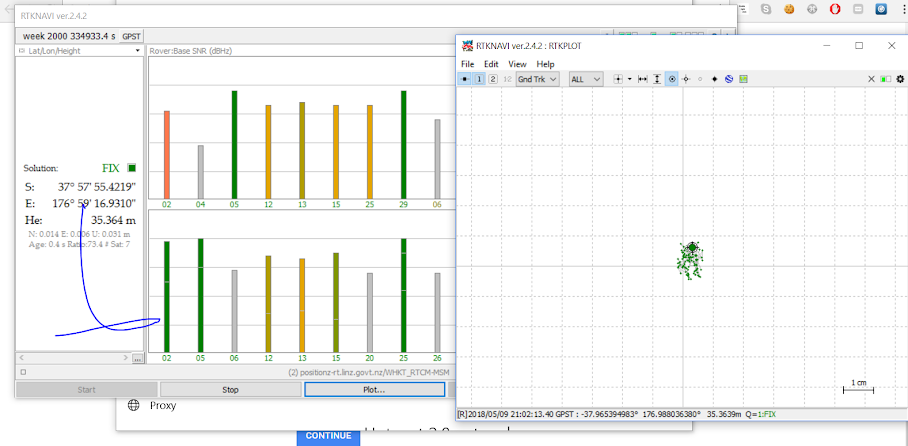
Although I would agree that a lot of people do not have reasonable expectations of RTK GPS systems, I think you may be a little pessimistic as to what is achievable. My $80 S2525F8-GL-RTK receiver coupled with a $25 antenna quite happily gives me absolute location to within centimetres. I come from a family with 3 generations of land surveyors here in New Zealand. Verifying the accuracy of my GPS was relatively straight forward using a 6th order cadastral permanent reference mark on the road side kerb about 20m from my home. These marks have an absolute error of +/- 30mm and my GPS was within this margin of error. In this case I tested a free NTRIP service for corrections with a baseline distance of approx 2.8km. This gave pretty much the same results as that achieved using our own Trimble base station ($30,000 cadastral survey quality instrument) on another 6th order mark approx 100m away and the same as using another ‘cheap’ S2525F8-GL unit set up as a base station on the same mark. I use these GPS modules on my rovers and in a good environment can maintain a fix solution ~90% of the time. Here in NZ where we can not rely on any augmentation systems, I can not see why a local base station with a reasonable antenna and view of the sky would be significantly worse that the nationally available network of corrections that is made available by the government. Sure, the government stations are in prominent locations using top notch gear, but the error introduced due to baseline distance is in the order of 1ppm (1mm/Km) and this often gives an advantage to the local gear. For our survey jobs, the best accuracy is always with our own local corrections. I think that in this case of this video, the limiting factor when it comes to positional control is not related to accurately knowing the position of the vehicle…
I’m not saying with a few point tests you can’t get quite good accuracy. But it’s not as consistent using a single correction point as a real correction network is.And it’s only horizontal position, not vertical. There is a larger error on vertical. And the second factor is that the aircraft has to be able to fly with cm accuracy, which it can’t do.
The only advantage with the RTK with ground-based correction is say you fly a flight one day and get a particualar ground track. Come back a week later and fly the same flight. You won’t get the same ground track but it will be accurate +/- 2 meters (usually). The RTK system, in reality, will provide sub-meter but not single cm accuracy on that ground track and it will change even if you have the ground unit in a different location than the first time. It is still affected by all the factors that cause GPS drift - satellite position,s, atmoshperic refraction of signals, multi-pathing and the environmental conditions acting on the aircraft.
Many people have the mistaken notion that GPS is 100% reliable but it’s not. It is why there is no such thing as GPS-slaved approaches to minimums in full-size aviation. It can be used for navigation, but when it comes to precision approaches the good old ILS with localizer and glideslope is still used. Because in the atmospheric or environmental conditions (such as driving snow, fog, rain with ceiling <50m and visibility <100m) where that precision instrument approach to minimums is actually needed, GPS is increasingly unreliable the closer you get to the ground and the faster you go.
So for the average drone hobbyist, or even professional survey drones, you’re not going to see any difference between RTK using a local ground-based correction vs a regular M8N - except on path-to-path accuracy for which it will correct below the usual +/- 2 meters to a better level of accuracy. But 1 cm is unrealistic due to the limitations of the aircraft. An application I can think of for consumer-grade RTK is spray drones operating a meter or 2m above a crop on pass-to-pass where normal GPS (or even the baro) will not be able to maintain a ground track to prevent skips or overlap, and altitude estimate will not be reliable enough to maintain the correct vertical separation from the crop canopy.
So seeing any difference between hovering with a RTK vs regular M8N is just not going to happen. There is a difference between a static receiver and the dynamic environment onboard an aircraft. So if there is two trees exactly 2 meters apart and your aircraft is exactly 1.98 meters wide and you have the mistaken notion that RTK will fly your aircraft between those two trees without crashing it - not gonna happen. In the real world you’ll be really lucky to fly your aircraft beween those two trees twice in a row at 3 meters apart, and achieving that feat three times in a row brings the odds very close to zero using just RTK GNSS for navigation. All it takes is a signal glitch caused by the trees themselves, or a little wind gust to mess up your whole plan.
Chris, I think that part of our differing points of view comes from the fact that you obviously are coming from an aviation background where as I am coming from a land based background, but I do think that there are some fundamental inaccuracies in some of what you are saying. Are you sure that you are not confusing PPP GPS with RTK GPS? RTK gps does not typically require a ‘correction network’ but rather a single base station. RTK (short base line) is typically more accurate than PPP but PPP gives you coverage without the need for a local base station. One significant factor in RTK accuracy is the ‘baseline’ length which is the distance from the receiver to the (single) base station providing the corrections. The accuracy of the reported receiver position increases with reduced baseline length. This is primarily due to the both the receiver and base station having a more similar view of the sky which improves modelling of atmospheric effects. For this reason, implementing your own ‘local ground-based correction’ provides increased accuracy, not less as you seem to believe (presuming your local base station has a decent view of the sky). As surveyors, we only use our own base station when the highest accuracy is required. There are networks that utilise multiple base stations to synthesise a virtual base station and this does improve accuracy compared to using a real station that is further away, but it is not as good as having a single base station that is closer. Yes, due to the geometry of the constellation relative to the surface of the Earth, vertical accuracy is always less than horizontal but we are only talking twice the error which is in the order of a few cm for RTK. You also seem to believe that RTK GPS is not accurate in an absolute sense, with subsequent measurements separated by time giving different results. This is not true as a general rule. If you have an unimpeded view of the sky and a good constellation then your RTK fix solution should be accurate in an absolute sense. I am not sure why you would believe otherwise? This is obviously something different from being able to control a vehicle well enough retrace your previous path precisely. In working with both $20,000+ high end multi band GPS equipment as well as the cheaper <$100 gear, I find that the overall accuracy in ideal situations is not so different but the expensive gear is much quicker to achieve a fix and holds it for longer under challenging conditions. Conceivably there are situations where I could conduct an entire survey job using only one of my cheap RTK GPS units and I would achieve satisfactory results, however it would definitely take me longer and I would be limited to suitable environments but accuracy would not be the issue. I for one have found the availability of cheap RTK GPS has made a huge difference to what I can achieve with my rovers and the difference is as obvious as night and day.
No, I’m not. You’re talking about the most basic of RTK systems - the straight-line system with a local ground based transmitter that you carry and setup yourself. This is impractical for covering 8 million acres with an airplane going from field to field at 180 kts. The ground crews would need Formula One race cars to race field to field and set up ground correction transmitters.
We’ve been using RTK Clusters in aviation for over 15 years. And RTK Networks for the last 5 years. The old RTK clusters used to use UHF/VHF spread spectrum.
The RTK networks we use now are cellular and the reference station data is processed by central servers.
We disposed of the local reference station concept over 10 years ago in high-end aviation systems.
Just to relate the accuracy discussion back to the original post, I do not see much more than a few cm horizontal deviation in Loiter mode video. I’m not sure you are ever going to get much better than this outdoors regardless of how accurate your position information is. Looking at the parameters in the log file (I can only access one of the links posted) I can see that EKF2 is being used and that EK2_ALT_SOURCE = 0 (Use Baro). Setting this to 2 (Use GPS) may give you better vertical control with an RTK Fix. The log file from the loiter test should give some indication as to how accurately position was tracked and how well Arducopter was dealing with keeping it on target. The only log file I can access doesn’t seem to have any data from loiter mode.
Hi Chris, isn’t the setup I am referring to by far the most common setup that would be encountered here for those using Ardupilot and most certainly the most likely setup for this thread? I wasn’t aware that the discussion progressed to the point where we were optimising GPS systems to cover 8 million acres…
OK, I digress here. What you’re using is 15+ year old technology that basically nobody, including the land survey industry, uses anymore. It was found long ago that using local ground based correction stations doesn’t work in a dynamic environment in aircraft and ag machinery. It uses RTK-float a good portion of the time even on a quarter-section, which is no better than regular GPS.
Thanks for your analysis of the logs, I will try to adjust the parameters for additional testing.
In addition, the log contains the Loiter mode of the fragment. You refer to whether the log that can be read is the first or the second. I will re-upload the log file with the problem as soon as possible.
It would seem that someone in your position that believed that RTK GPS was a waste of time and money giving no advantage over standard GPS to those people frequenting this forum, would have some evidence to back up your claim. I can only see indications to the contrary.
I am convinced that Chris with his massive experience has seen those standard GPS units fail around him. It could be hardware, wrong installation and interference. Some time you guess.
But I personally have not had any bad experience with my about 10 units I own except they failed after a bad crash.
You as a Surveyor knows Photogrammetry for sure.
That was my business before I retired. And I can tell Chris that I was always amazed how accurate ground control points have been from those Trimbal mobile stations, local Surveyors used and supplied to me from the early 2000 on.
And today I use those cheap hobby grade units like ,HERE GPS, 3DR and others with very good results when I auto land my aircraft. My evidence is the onboard camera from takeoff and landing.
Same vegetation, same spot. Most times less than a meter difference.
The error between the takeoff point and the return landing point is less than 1m. The M8n’s single GPS can also be achieved in good environmental conditions, open, large number of search stars (18-22) and HDOP less than 0.6.
I’ve been using these systems for better than 20 years doing precision aerial ag application. The fledgling drone industry still has a lot to learn. It’s surprising that they sell these systems without even mention that in most countries you need a license for the transmitter.
Yes it is obvious that Chris has a lot of experience. I have also been in my job well over 20 years. I think that Chris and I are coming from opposite sides of the issue with myself focused mainly on single point static accuracy (as a surveyor) while he focuses on accuracy over a very large area in a dynamic environment. However I do not understand why Chris point blank denies the usefulness of these newly available RTK GPS units and considers them no better than your typical ‘M8N’ This has definitely not been my experience. Unfortunately I have not flown heli/multicopters for a number of years and these days I am strictly a rover man. I am happy to put in some effort to demonstrate the benefit of RTK (perhaps in a new topic). If I were to add an M8N to a rover that already has RTK GPS and manually drive it around say the lines on a sports field a number of times over a few days so we could compare the results, would anyone consider this a relevant comparison? I for one am confident that the RTK GPS will definitively demonstrate better repeatability and overall accuracy compared to the M8N alone. I am open to suggestions?
I do think it is time we opened a new thread on this topic so the myths and truths about RTK can be aired in one central point.
I do a lot of work with a Spacial Analyst who has been doing high end survey work for over 30 years, and have seen him get quite heated with discussions about RTK accuracy as he prides himself on always getting sub cm accuracy in the work he does.
There is, however, one thing I have noticed in this and other discussions, and that is, RTK being referred to in general without the qualification of how many frequencies are used.
Even from my ‘mechanics’ viewpoint of having to setup the gear and get it working, if anyone expects to maintain RTK Fixed with a single frequency L1 system (Ublox) then good luck to them, because it aint gunna happen.
I just tell my Spacial Analyst associate to ‘smile and nod, smile and nod’ when he gets hot under the collar seeing single frequency systems pushed as RTK solutions.
So a seperate thread on the whole RTK thing is well due in my humble opinion.
I skimmed most of the comments here, (will come back and read them properly but just to comment on a specific part:
So seeing any difference between hovering with a RTK vs regular M8N is just not going to happen.
I see a significant difference between the performance hovering a quadplane with a uBlox 7, and a AsteRx-M2. The receivers estimates of their own horizontal accuracies was 2.2 meters vs 0.8 meters, there was also far fewer sudden jumps in position/velocity reported while hovering which leads to a significantly better loiter performance (in VTOL mode). This was without doing any corrections other then SBAS, but serves to highlight the effect of a higher end L1/L2 system and decent antenna.
The aircraft is still going to move around in the wind. There is no such thing as holding position +/- one cm with a hovering aircraft. The problem with these straight-line systems is range. You basically have a little circle around your ground correction station where you get one level of accuracy. Then as you move out from the base station the accuracy drops off. If the signal drops the system goes to RTK-float, which is no better than regular WAAS-corrected GPS.
Hovering an aircraft 30 feet from the ground unit doesn’t tell you anything. Take it out and fly a quarter-section survey with it on an hour long flight and then see how many RTK-floats you get. Your data will be useless and require a huge amount of post-processing. In which case you may as well go with a PPK system in the first place.
If you’re not using the system for real survey work, then it’s great to play with and experiment with at not much cost. But these systems are simply not suitable for +/- cm pixel survey accuracy for professional use. One of those BTDT things. You have to understand the limitations of the aircraft and the limitations of the entire system controlling it. And the fact that aircraft operate in a quite dynamic environment. With full-size ag precision application aircraft we shoot for sub-meter but rarely actually achieve it. The Jet Rangers can get consistently close to sub-meter because they’re slower. But the 802’s at 140kt pass speed are usually +/- 2 meters. The real time system and computers simply can’t keep up to fast turbine fixed-wings going 72 meters/second. The pilot is always dealing with information that’s about 1.5 seconds late and about 100 meters back. So the system has a “look ahead” built into it that is basically a calculated estimate to give the pilot real-time correction on aileron on the pass.
The old ground-based RTK systems we used 20 years ago got rid of the spotters and flaggers on the ends of the field. But they were horrible on accuracy. The systems we use now are much more accurate. But no matter what, you’re always fighting wind. Even on a still day your wingtip vortices are still there on the next pass. So we try to combat that with “racetrack” application patterns.
Small drones are a like leaf fluttering in the breeze in comparison to a 802 with a 59 foot wingspan and 1,680 shaft horsepower putting the twist to a 10 ft diameter windmill. So accuracy conditions for small UAV’s are worse than for full size because they have quite low wing loading and stability, in comparison. The saving grace is that UAV’s are slow so the system is better able to keep up. But in Copter a UAV heli at 27m/s can’t even hit the waypoints due to limitations in the Nav Controller design, much less expect that a L1 RTK system is going to provide cm accuracy on a ground track. Regular old GPS works just as good.