
Norce, as a participant in CAATEX (Coordinated Arctic Acoustic Experiment), has reached the geographic North Pole using Norwegian coast guard ship / ice breaker.
We had two 23-24kg TOW OctaQuad’s with us, along with two fixed wings planes.
The Octaquad’s had two payloads developed by us / UiT: one with a low freuency, high bandwidth ice-penetrating radar, and the second with a high-resolution stereo-camera plus spectrometer.
The payload was mavlink-integrated too, and the radar onboard computer uses mavlink data.
The planes was for photogrammetry and FPV ice-scouting only, no special payload.
We flew on the north pole, and many other places nearby.
Conditions were mostly 6…12m/s wind, -6°C and -2°C in the water. Typical ice thickness 2-3meters. Depth was 4-5km. Dew point and temperature were always very close, so we have experienced great icing conditions.
We had some clear ice buildup on some flights.
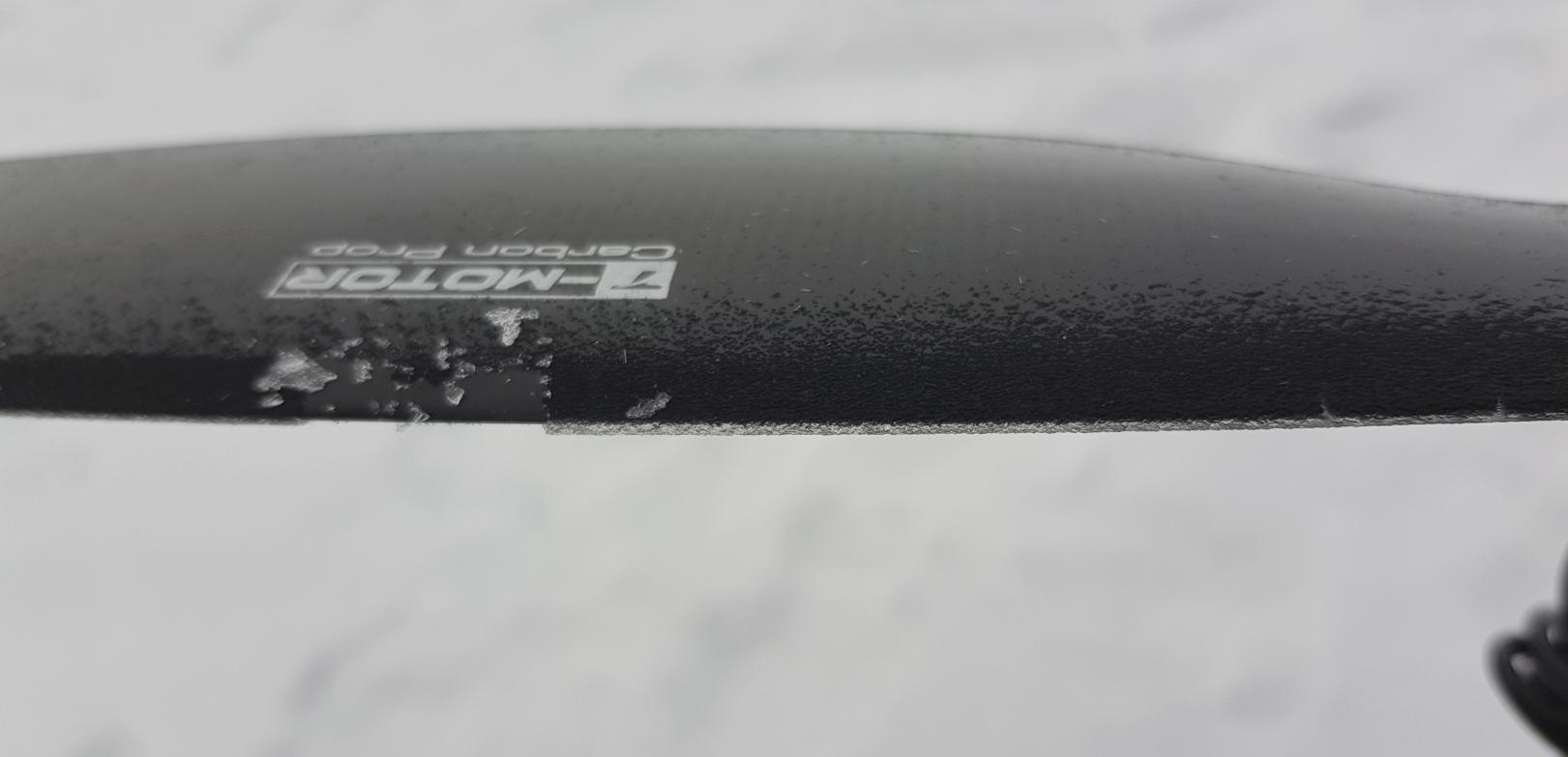
and some strange, spiky ice, especially near the propeller hub on others.


I monitored the throttle demand closely, but we never built up enough ice to significantly affect the performance due to overpowered design, (hover at 23% throttle).
The ice is almost always drifting, so auto missions were not always feasible, and a lot of manual flights related to ground markers (traffic cones) were performed.
On one occasion, I flew a plane “around the world”, at such high latitude, it is not that far. The autopilot did not mind that, many smartwatches went nuts while changing time-zones “constantly” in that area.
We were less than 500km from the geomagnetic north pole, I expected the yaw (based on magnetometers) to be a bigger issue, but due to the brilliant EKF, I could always take off, and in worst case, after flying a box manually, the copter would be able to hold position/navigate just fine, and could have done auto missions just as fine as the RTL I tested a few times.
Great work, thanks to all developers/contributors. 
