I have a working QuadPlane (4+1) and am wanting to migrate to a tablet for waypoints and have access to Apple and Android. I know there is a beta of MissionPlanner for Android and it didnt work well for me on my devices, so I am looking at QGroundControl.
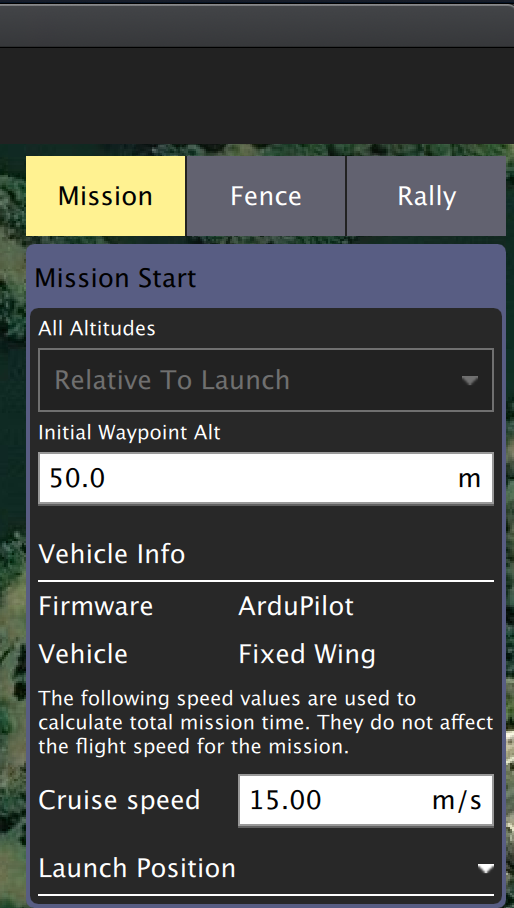
With the ArduPlane connected, the system links, etc. But when I plan a mission it is an aeroplane/fixed wing only. Its not appearing as a VTOL…
Not sure if this means anything, but i had to set the param “Q_MAV_TYPE” to “VTOL_QUADROTOR” (Default was “AUTO”), else QGC detected it as an ArduPilot Fixed Wing.
But QGC now has not SAFETY or FENCE options (not supported)
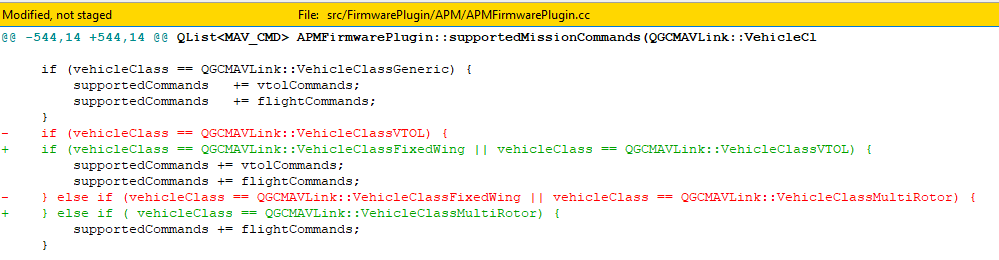
It’s a bug in QGC, still contained in the most recent version (V4.1.3)
I fixed it for our QGC with the code in the graphic.
Previously there was a fixed set of APM Firmware commands. Now the commands are filtered by
vehicle class. However a VTOL often is defined as fixed Wing, and changes it’s type during fly
with VTOL transition command.
So from my understanding a fixed wing must contain the VTOL commands, too.
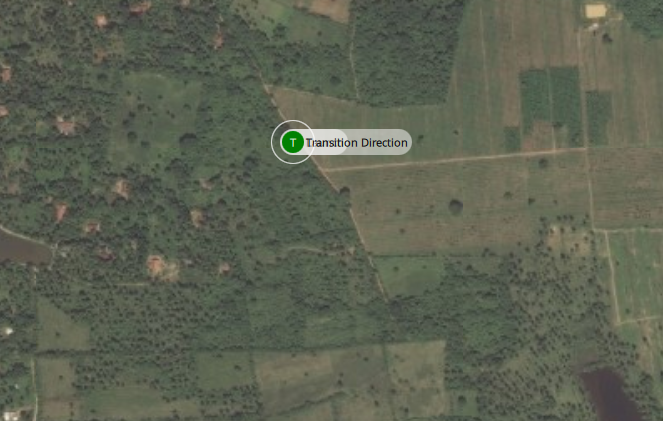
I’m Also having a issue with this in QGC, it doesn’t let me put the transition direction waypoint ( tried in both PC and android) it seems like its on top of launch waypoint, , it tries to take off like a fixed wing aircraft (Not VTOL), But if I select Pix4d VTOL instead of Ardupilot VTOL it lets me set the transition direction, What am i doing wrong here?