After many flights and some change of parts due some crach will my copter not lift.
I have changed the motors as well as esc.s and upgraded the software to 3.5.5
At full throttle, the copter is lifting only a few centimeters.
It feels like esc.s cant been calibrated.
Looks like your battery was completely flat. Assuming you have a 4s battery you are 13.1 volts or 3.28 volts per cell. That really dead. upon throttle up it drops to 2.83 volts per cell. You really need to set up your low voltage parameters, that copter shouldn’t arm if you make a mistake with the battery.
The motors response to throttle is really strange , I suggest to run again radio & Esc calibration and check how propellers are mounted. What Esc are you using ?
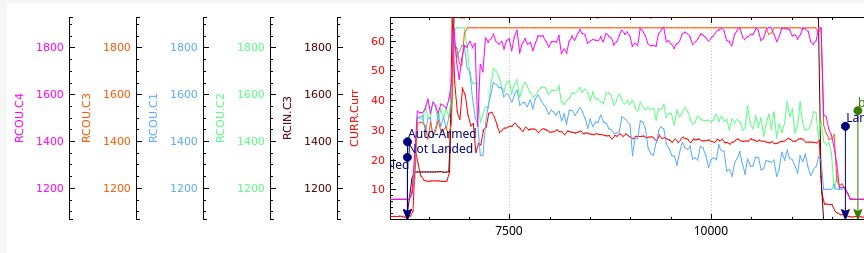
Motor 3 when throttle , Rcin.C3 , is at maximum show a weird flat line around 1816 pwm while motors 1 & 2 have much lower values.
There was some error on calibratingof battery monitor, thats now fixed.
I belive that the big issue is the esc calibration, the radio is calibrated.
The motors and esc have been changet after I uppgradet to the last software.
The copter flies well with the old motors and esc.s The new esc,s firmware is SimonK.
In my honest opinion SimonK is the source of your problem.
Get some Hobbywing X-Rotor ESCs. I’ve been using X-Rotor 40A ESCs for several years and they just work. The only thing they need is throttle calibration and you’re good to go.
Once upon a time I tried some ESCs with SimonK. Quad was unflyable and wasted way too much time trying to “fix” it. Threw the ESCs in the trash and went back to Hobbywings.
Like I said, BLHeli is fine for a racer, and you can do all sorts of neat stuff to the ESCs all at the same time using BLHeli Suite and the CF pass through functionality. BUT you can’t do that with a Pixhawk, and doing ESCs one at a time is a royal pain in the backside. BTDT, burned the T-Shirt.
My real point is, every time I get into a discussion about BLHeli and ArduPilot, NO ONE has yet to give me a definitive list of reasons with empirical data to back up their claims that using BLHeli ESCs on anything other than a PixRacer in a racing frame is “better” that using plain jane ESCs with a Pixhawk on an AP rig. Every thing I get is pretty much the same story, “It works fine for me.” Anecdotal testimony isn’t useable data.
So, until someone has some real empirically generated data to look at I’m sticking with what I know works.
I have the same problem! My ESC is simonk. I did every things, calibration ESC (via radio), Radio calibration, radio stick calibration propellers and motor direction, but it just can lift for 2 cm. in one of my test it could lift to around two meters but it landed gradually. I do not know what is wrong with it! I do appreciate any help.
Here is the #1 reason for using BLheli_32 ESCs … Being able to switch motor direction in software so you can directly solder the motor wires the ESC , which allows for a much cleaner build.
Also before it’s questioned, right at the end of each arm, before the motor mount there are 1000mf 50v Ultra low ESR caps
#2 Is ESC telemetry to provide feedback on Temp/RPM/Current… Which then allows for the Dynamic Harmonic Notch to be much more accurate.
As far as for performance? Nope, not that I have found. But the above upsides really make it worth it