Hi Experts,
One persistent issue I have been encountering with my F450 drone, equipped with flight controller Pixhawk 2.4.8 with version V4.3.6 and an M8N GPS module, is the inability to maintain a consistent location. This problem may be quite frustrating as it will affect the overall stability and performance of the drone during flights. Despite initial setup and calibration procedures being followed meticulously, the drone fails to hold its position accurately on the Mission Planner Map.
I am also attaching a video for your reference please let me know if there is anything to worry about: M8N Gps location not fixed.mp4 - Google Drive
The video is of little help. Please post a small .bin log file showing the problem
Hi, here is the log file
2023-05-21 05-28-36.bin (459 KB)
That’s laughable. This craft is on default parameters with no evidence of any pre 1st flight Initial Parameter configuration let alone any attempt at tuning. That’s from the parameters extracted from this mostly useless log file as it’s not flying.
I suggest you read the Documentation from the beginning and configure this craft for 1st flight correctly.
Hi,
By initial setup and calibration, I mean that I have set the frame type, calibrated my accelerometer, radio as well as the M8N + Gps Module i.e. all the basic setup.
Yes, I have not flown the quadcopter not even a single time, I have just armed my quadcopter and then looked onto my mission planner and found out that my drone is not fixed at a single point on the mission planner map as shown in the video: M8N Gps location not fixed.mp4 - Google Drive
I just want to know the reason for that is my M8N GPS module defective or there is any other reason?
In addition to what Dave suggests, to work well you must have the HDOP GPS parameter lower than 1. To do this, test in an open environment without obstacles and with the GPS mounted on a stylus to raise it and distance it as much as possible from the disturbances produced by the other components electronics of your copter
And set FENCE_ENABLE,1 to prevent arming until there is a GPS 3D fix and Home can be set.
Then you know RTL will bring the copter back to the launch point instead of somewhere in the middle of an ocean.
I have done the testing today in an open environment and was getting an hdop of 0.8 and the satellite count was 13 but my quadcopter is still moving every sec on the map and didn’t have a fixed position which was not close to my house hence cant set the home location also. I had a 3D Fix also.
Done what you told me, had a 3d Fix also with an hdop of 0.8 and 13 satellites. Still facing the same issue of the quadcopter not being at a fixed position on the mission planner map.
Perhaps your expectations are too high for a typical M8N module. Try setting the GPS_GNSS_MODE to a sat combination that works best where you are. GPS+GLONASS is the most common. It’s still going to move around some.
So can I switch to flywoo goku gm10 pro v3 ? Or can you please suggest me some better gps + compass module than m8n at the same price point…
How far is it moving? If it’s less than 3m, that’s about as good as you’ll get without RTK GPS.
It’s keeps on moving, yes more than 3meters
What mode are you flying in?
I am arming it is in stabilize mode currently not flown it yet. The problem is that when it is not even flying the drone position is changing very quickly and that too about 5m or more from my location.
Can you send a log of the aircraft? Either armed and siting on the ground for a long time - or set LOG_DISARMED to 1 to get a log while the aircraft is disarmed.
Sure will be sending tomorrow morning as it’s late now
I don’t know, haven’t tried them but I’m generally skeptical of very cheap hardware. We’ll see. I have used many M8N’s and they have all performed as expected. If it’s sitting outside away from interference a couple/few meters is to be expected.
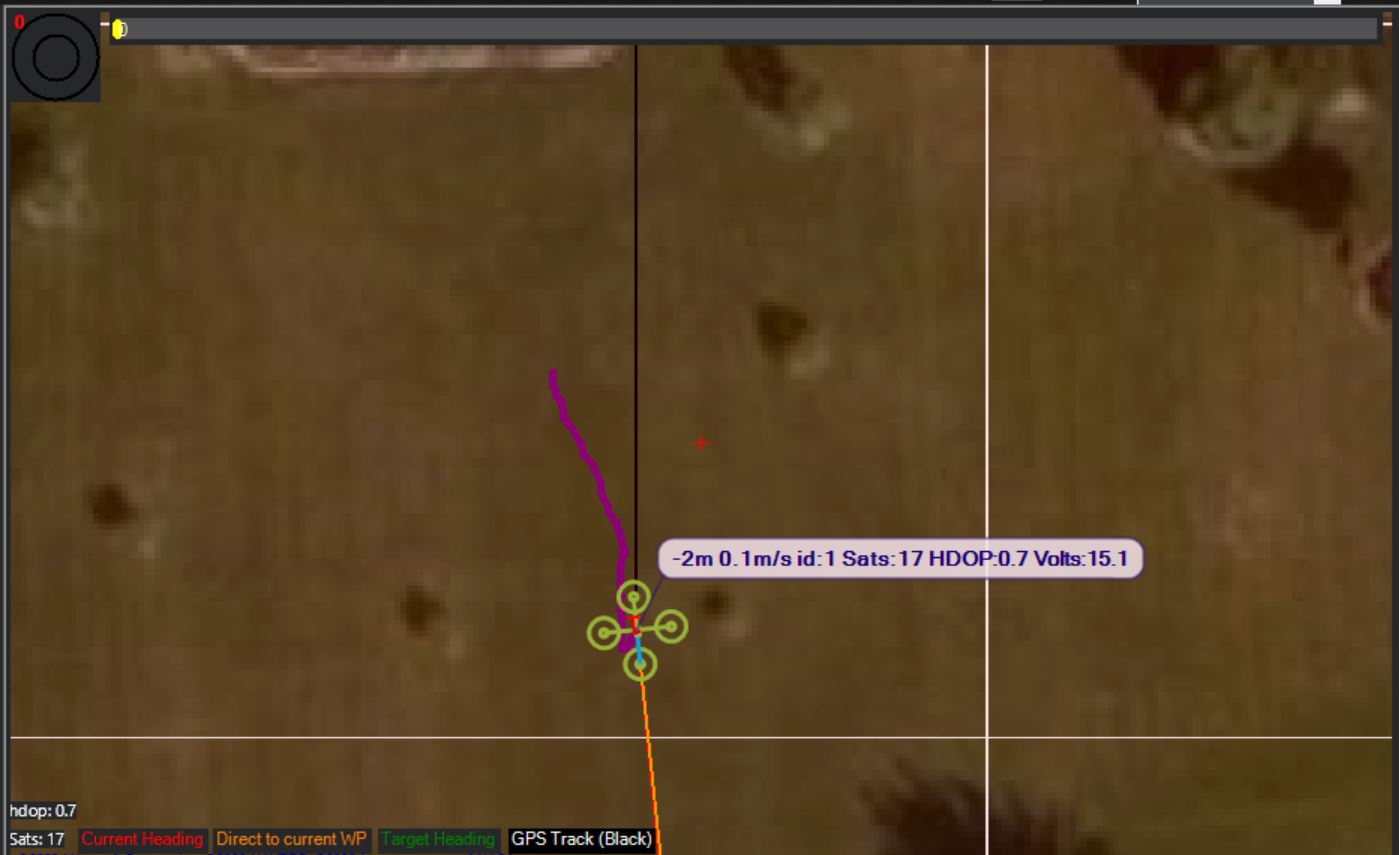
Here is one I’m flying this afternoon. A generic M8N. The vertical track is ~ 2.5m and it will wander around within that radius. Sometimes more, sometimes less. No worries, it’s typical:
Thanks, your answers seem to solve my problem. This means is common for the quad to change the position frequently on the map.
Well it can be particularly while landed or very close to the ground. It’s where GNSS signals will have the most difficult time. The wandering will improve once you get a bit of altitude.
Also set GPS_GNSS_MODE,65