Hi, I do need some thoughts and help with a new build small 5" copter. The firmware I use is ArduCopter V4.2.1 (c8b6b674) on a cube black at a mini carrier board.
As I cant get GPS runing I unchecked all pre arming settings and tried to arm.
All I get is a 2 tone double beep and the message “Command was denied by the autopilot”
I dont know to proceed…any help welcome!
Hi andyp1per!
BRD_SAFETY_MASK
BRD’_SAFETYENABLE
BRD_SAFETYOPTION
is all set to “0”
I first time use these type of ESC`s
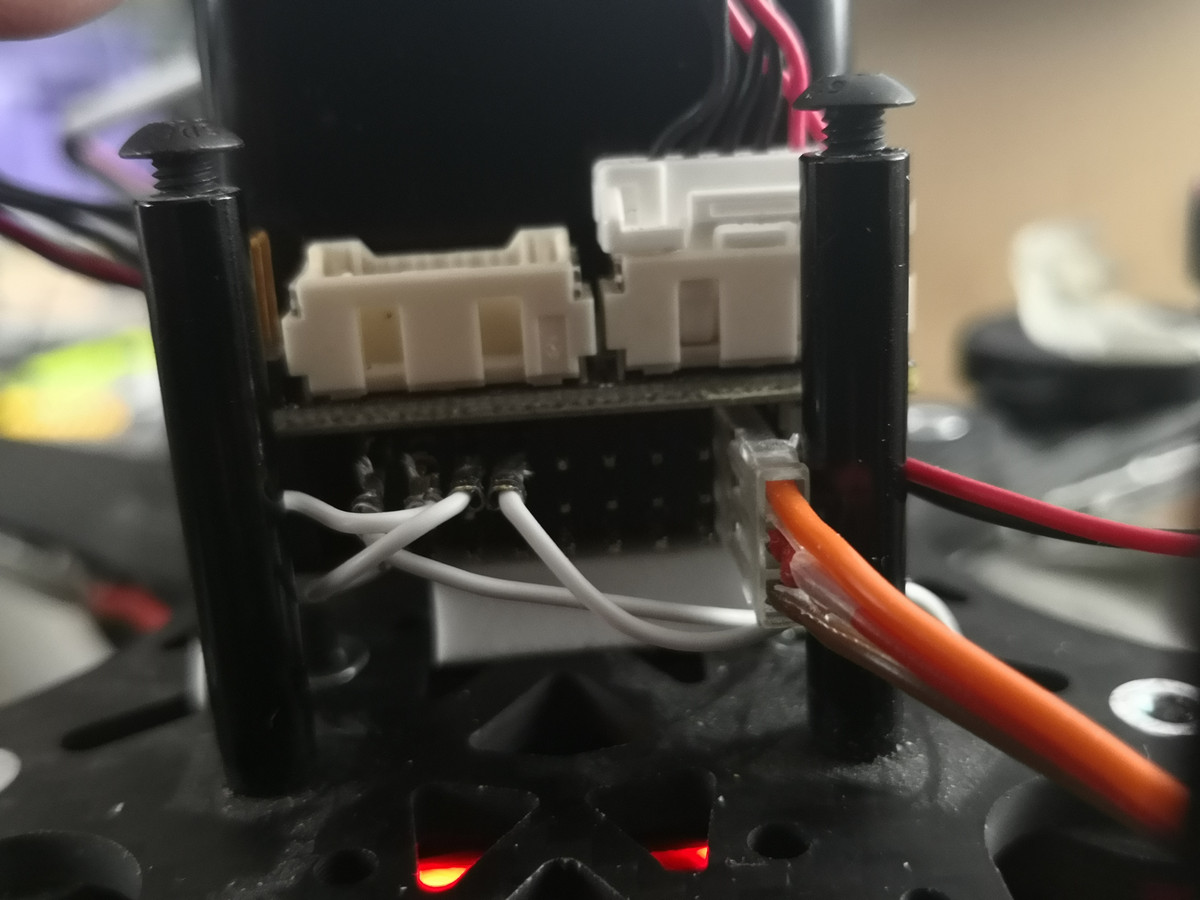
Is the connection with just the signal cable to the cube carrier board upper pin line and no extra gnd correct?
Looks like the pin orientation is opposite with the mini carrier board…RC signals are shown in the mission planner RC calibration tab, so I think this piture with upper pin line signal is okay?
In" ESC Calibration" I use “ESC Type: Normal” and did not change the settings.
Ok, now disabled the serial port 3, which was for GPS ublox and I can arm, but the motors dont run…instead I get loooong beep and the “Potential Thrust Loss (2)” message