Hi there !
I’m using APM 2.8 (Arducopter 3.2.1). with Vibration Damper.
Frame DJI F450.
Externally mounted GPS & COMPASS.
Mostly the quadcopter flies stable in all modes (Stabalize, ALT HOLD, Loiter, RTL etc.)
But in AUTO mode, sometimes it takesoff and performs mission pretty well & sometimes it crashes right after takeoff.
As far i can understand,
-
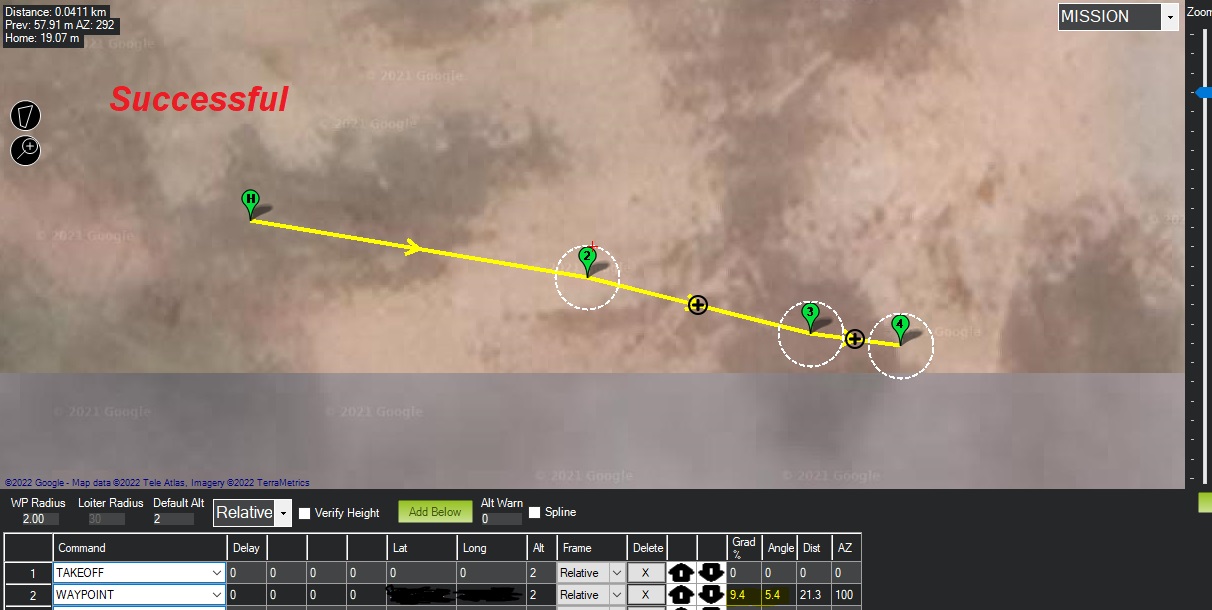
The copter took-off and did the mission successfully when the GRAD% & Angle right after take off were below 10.
-
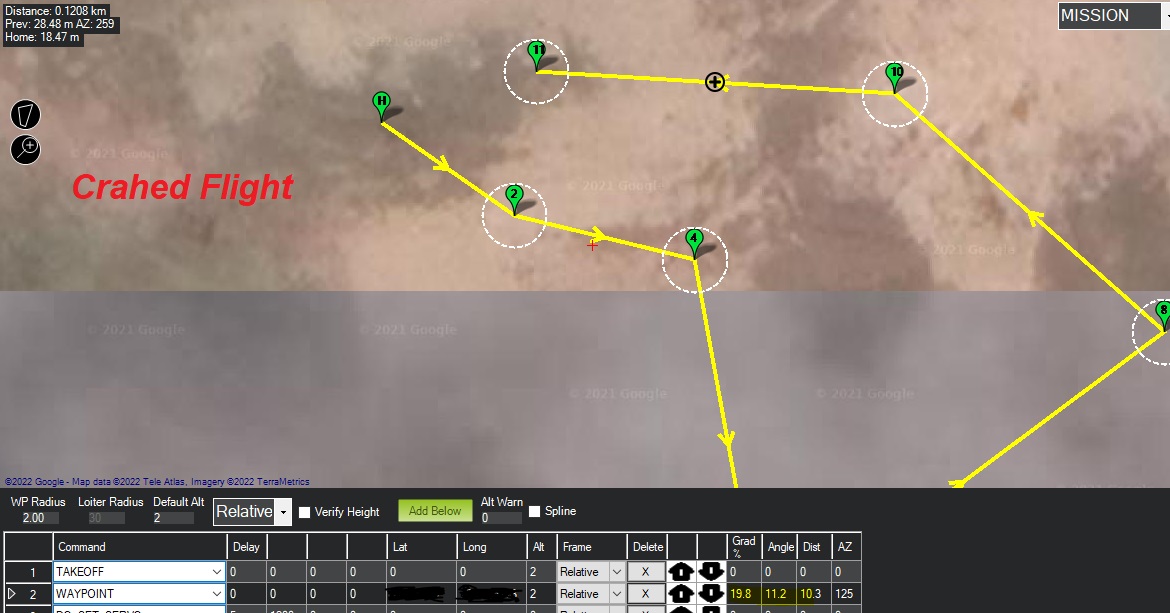
Whenever the GRAD% or ANGLE went above 12: The copter takes-off, but as soon it tilts for the next waypoint, it looses self-control and crashes.
Below are the Mission plans for the Successful and Crashed flight.
If someone can guide me about this ? Thanks…