Hello,
I am running this file called sim_vehicle.py through ArduCopter in Ubuntu but when it reaches the point of STABILIZE, the change in modes like guided,circle…etc is not happening.

Please help me solve this problem.
Thanks
Hello,
I am running this file called sim_vehicle.py through ArduCopter in Ubuntu but when it reaches the point of STABILIZE, the change in modes like guided,circle…etc is not happening.
Please help me solve this problem.
Thanks
The first screenshot doesn’t show the build output. How does it relate to the second one?
Did the build complete successfully, or is that mavproxy console unrelated to the sim_vehicle run?
@ kd0aij
The exact problem I’m facing is there in this link below:
[Setting Guided mode and Waypoint by MAVLink]
I put the first picture to show the initial command which was typed.
Inside ArduCopter I ran the file sim_vehicle.py - - map - - console
This step executed fully without any errors.
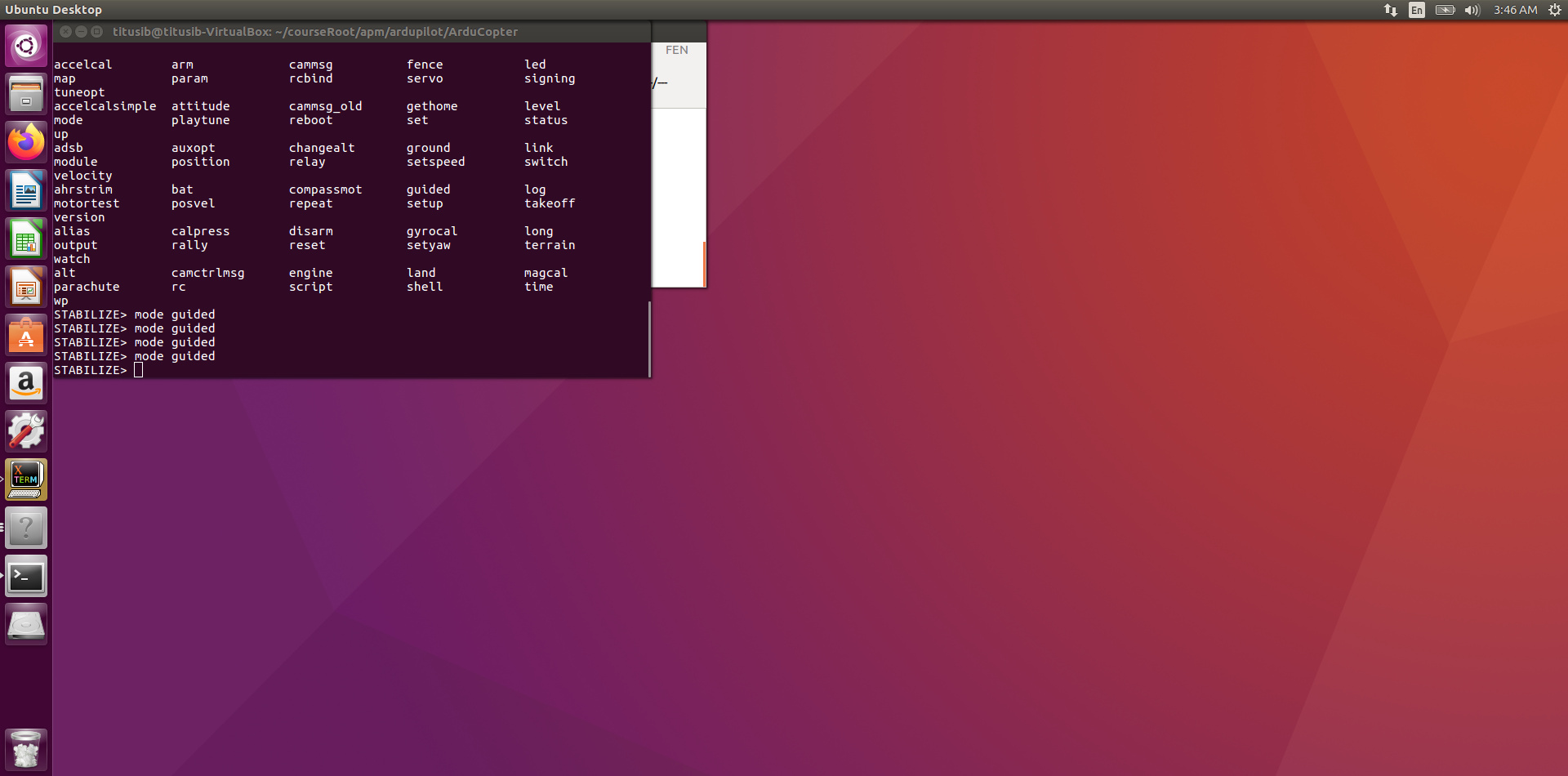
Second picture is the last line after running sim_vehicle.py. It says “Stabilize” which is the prompt for my first input like “mode guided” “arm throttle” “takeoff 10”…etc
It works for me. Did you wait for the EKF to initialize first?
APM: EKF2 IMU0 initial yaw alignment complete
APM: EKF2 IMU1 initial yaw alignment complete
APM: EKF2 IMU0 tilt alignment complete
APM: EKF2 IMU1 tilt alignment complete
STABILIZE> APM: EKF2 IMU0 origin set
APM: EKF2 IMU1 origin set
STABILIZE>
STABILIZE> APM: EKF2 IMU0 is using GPS
APM: EKF2 IMU1 is using GPS
STABILIZE> mode guided
STABILIZE> Got MAVLink msg: COMMAND_ACK {command : 11, result : 0}
GUIDED> Mode GUIDED
It’s working now for me. All I had to do was upgrade the ArduCopter Version and install again.
How did you upgrade it?
Can you tell me how to upgrade ArduCopter version, I am having the exact same problem that you are having.