Hello everyone,
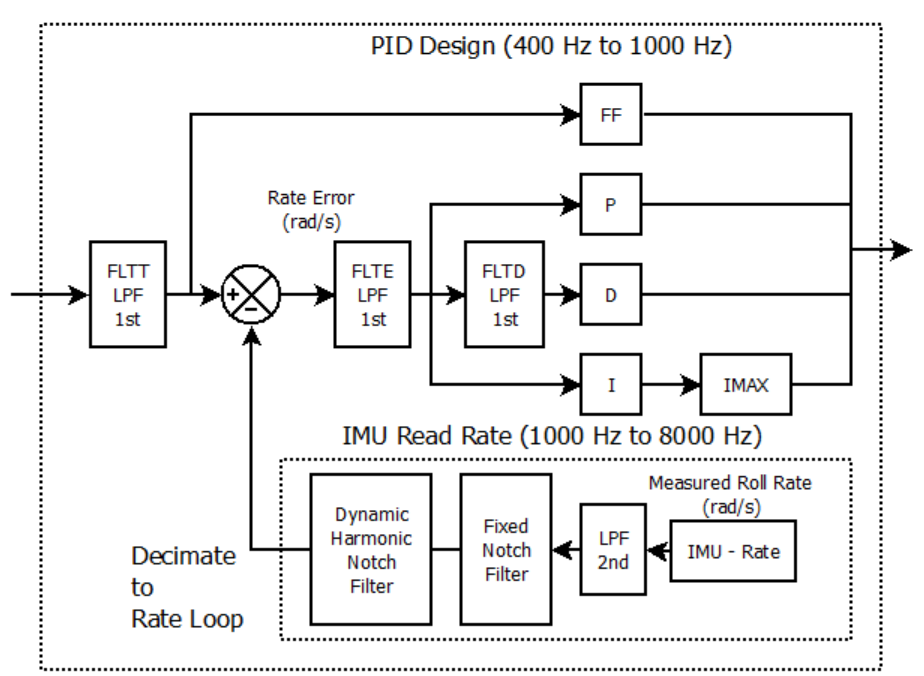
I am trying to tune the low pass filter that filters the rate error (FLTE). However, the problem I can’t understand the reason behind using such filter for the rate’s error. Moreover, the code already use filter for the reference angle (FLTT) and another second order filter for IMU rate data.
Thank you in advance for putting the time to help.