Hello,
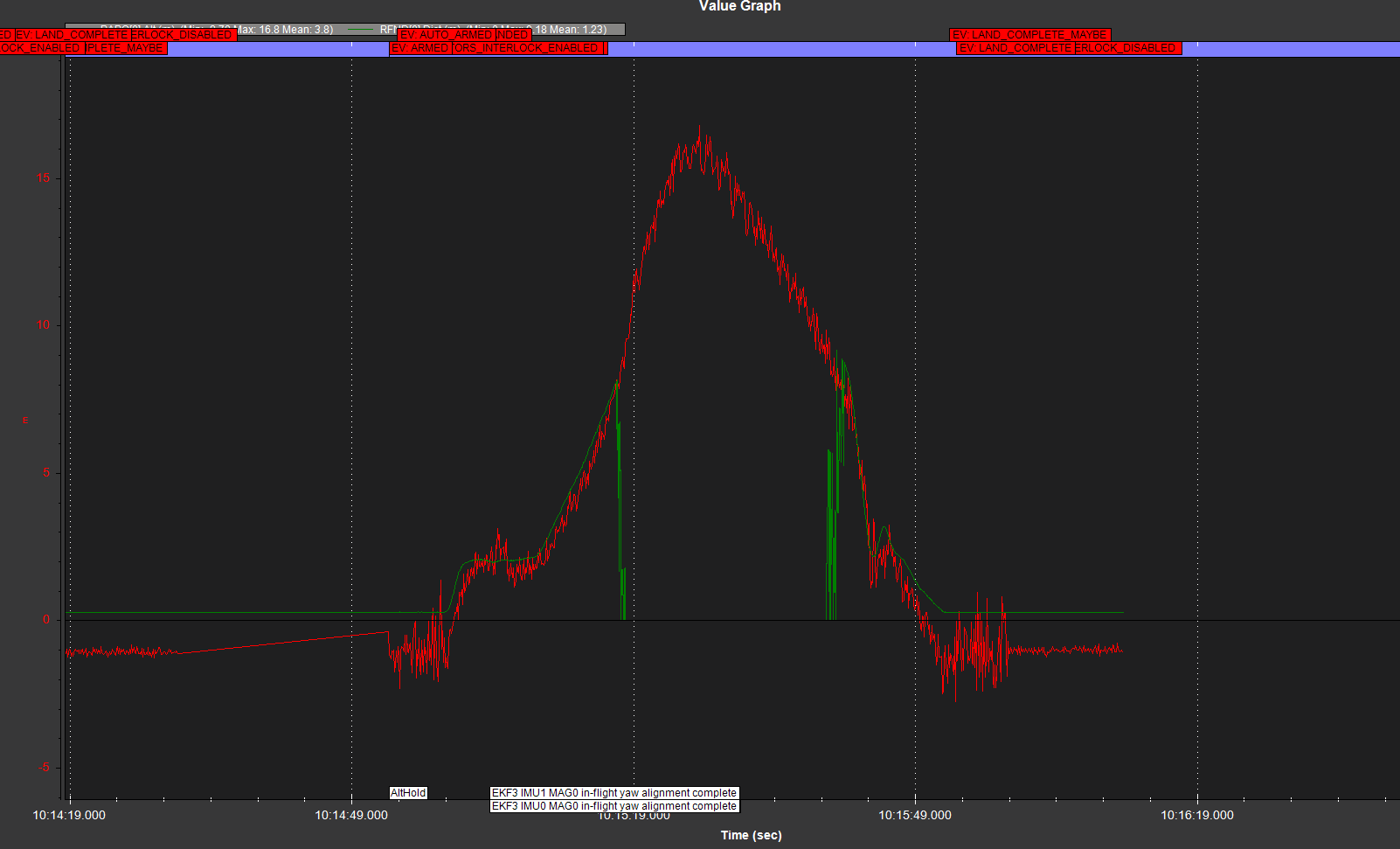
i have issue with my lidar setup, as you can see in my video, my copter suddenly goes up or down after cross maximum lidar range. I don’t know hw to setup it corretly to avoid this type situation.
Here you can find log file and screen with the same moment on video.https://drive.google.com/drive/folders/1bTxe6Re6gA2m2FBletIGAWv8w1SXPTHm?usp=sharing
thank you in advance
Axel1
August 30, 2022, 8:20pm
2
To begin with. What lidar are you using?
Update to ArduCopter version 4.2.3.
Why are you using ArduCopter 4.0.x?
My lidar is TFMINI plus
My software version is: 4.2.1 My fault sorry for that
Clogz
August 31, 2022, 11:56am
5
Have you made sure nothing can intermittently block the altimeter? That would give you this exact behaviour…
it is mounted on bottom centerplane and nothing can’t block view
Axel1
September 1, 2022, 11:11am
7
Heve you set the maximum lidar range in missionplanner according to the lidars specifictions?
@Axel1
Clogz
September 6, 2022, 5:26am
9
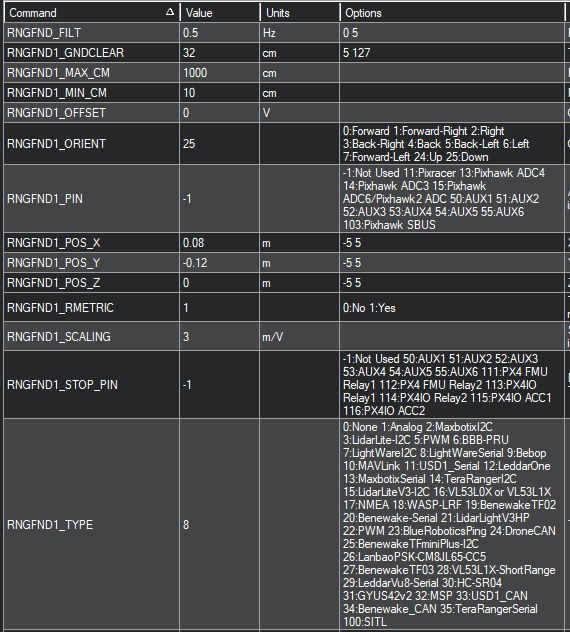
If you are using a Benewake TFMiniPlus you will need to set it to use that RNGFND1_TYPE. In the image it shows set to 8…which is a LightWare.