Thanks a lot for your work.
Thanks, good suggestion.
Running
./sim_vehicle.py -v ArduCopter -f heli --console
with initial mode STABILIZE and with an eye on the console, this sequence worked:
param set DISARM_DELAY 0
STABILIZE> rc 8 1100
STABILIZE> arm throttle
STABILIZE> rc 8 1500
STABILIZE> takeoff 5
STABILIZE> Take Off started
rc 3 1700
STABILIZE> mode auto
STABILIZE> mode circle
AUTO> AUTO> mode land
(auto interrupted and changed to circle for simplicity (possibly collective high))
Uploading the .bin log to the UAV Log Viewer gives this 4K video.
In spite of having generated it with
./sim_vehicle.py -v ArduCopter -f heli --console
the shape obtained is a drone
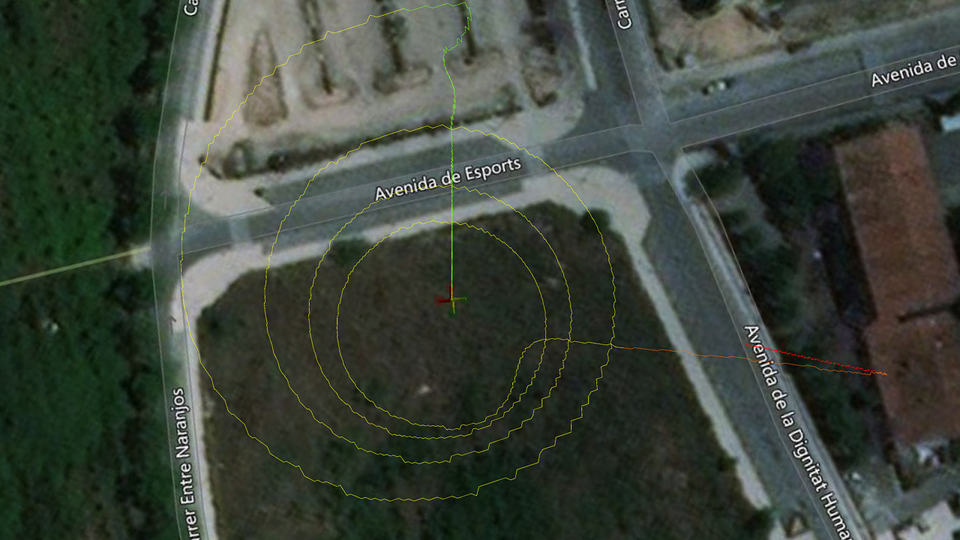
even on messages ‘heli’ can be found:
FMT, 8, 27, HELI, Qffff, TimeUS,DRRPM,ERRPM,Gov,Throt
MSG, 38481268, Frame: HELI
Trying
./sim_vehicle.py -v ArduPlane -f plane-vtail
gives
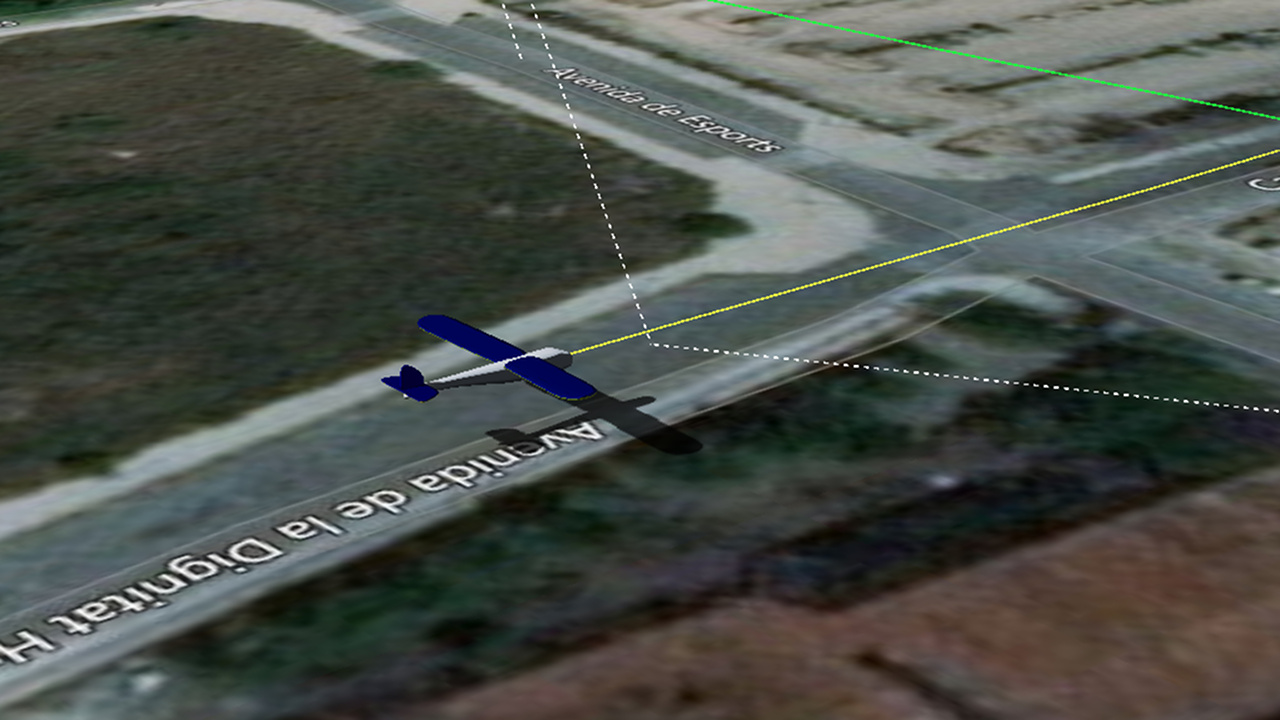
which is nice, but trying
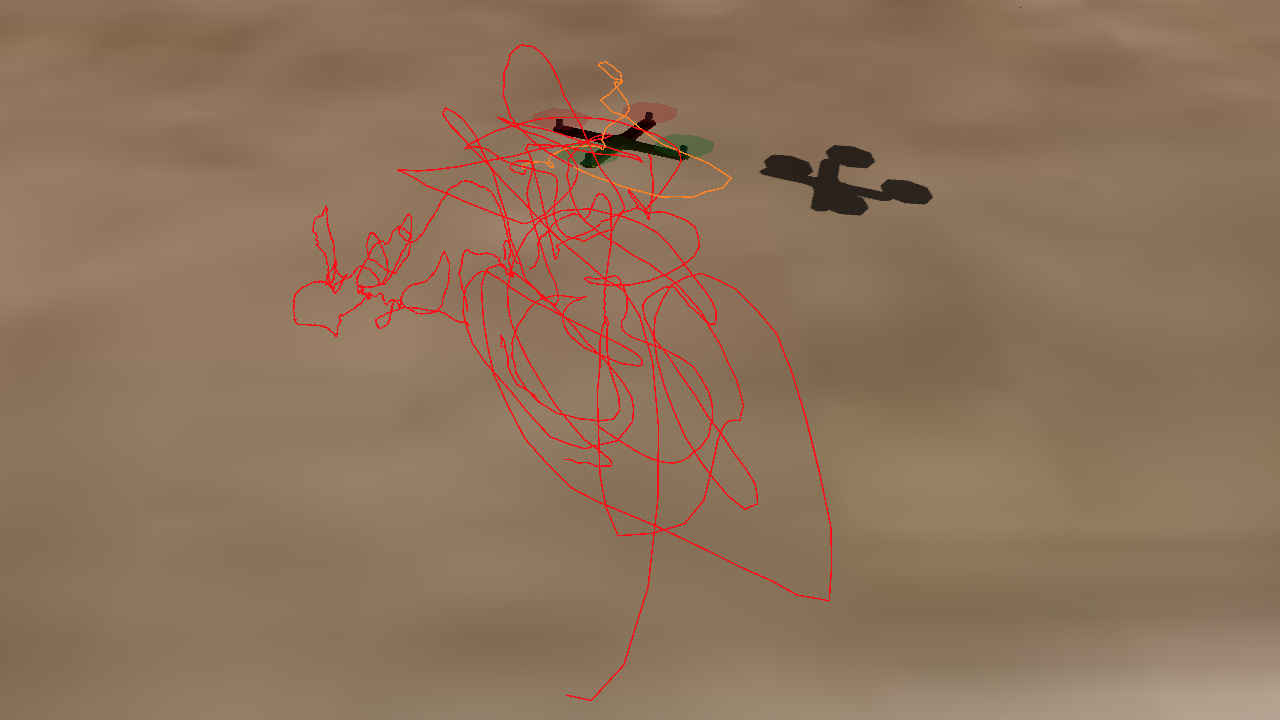
./sim_vehicle.py -v Rover -f rover
gives

which is not so nice (not that much water or rain in the circuit).
Trying uploading to the UAV Log Viewer real .bin logs (not SITL):
helicopter
(again drone shape)
rover

(again boat shape, with not that much water or rain in the circuit).
So all happens as if the plotter program at the server interprets the vehicle type but not the vehicle frame type.
Now uploading to the UAV Log Viewer a real rover .tlog file (not SITL)

which, believe it or not, corresponds to a rover.

That corresponds to running a rover on the rooftop of a building (around 20m above ground), so unless because of that the plotter program running on the server interprets that it must be a plane, something very strange happens.
Could something be done?