Hello user
My name is Igor and Im new here in forum, but already ArduCopter user since a few years. Marco Robustini told me that this would be the best place to ask for help regarding the log analysis.
I have a few copters but on one Im having continuos issues.
Setup
X4 Copter with 2 kg
550mm Folding Carbon Frame
SunnySky 3805-700 motors
13" folding-props
AfroSlim ESC with BLHeli
Pixhawk with ArduCopter 3.4
Neo M8N GPS
2x 5Ah 4S Lipos
500g Payload
Description
The calcs for the copter have been done in ecalc and from there everything should be ok including the payload. The copter flyes very well withouth any big problems in the air, also with standard PID very stable and fast in climbing altitude
At beginning I had no issues flying with 12" plastic props, but it was extremely loud like a Hayabusa and the climb rate was low. The payload close to the limit. In first fly attempts no crashes. I decided to go for 13" folding carbon props and the climb rate was perfect, the power consumption even at full speed within the ESC limits (max around 25A)
But I had a lot of issues with the Afros & SimonK. Continuosly out of sync and very fast flip on dead in the AutoTune mode on the axis where motor went out of sync. I could reproduce on ground the issue by putting the throttle from sticks to switches and changing fast from 0 to fullspeed. Had a lot of out of sync and burned 2 ESC.
I changed the ESC and one motor and after the advice from Marco I flashed them all with BLHeli. With some setting I kept having out of syncs, with damped light off + medium high timing no problems any more on ground tests with fast throttle changes.
I decided to do AutoTune again and first tryed with only one battery withouth payload (tail heavy).
Autotune over corn field withouth any issues, I was really happy.
I tried today again with 1 batterie + front payload (good center of gravity) over a corn field again.
AutoTune startet and at one moment, where I put the pitch stick back to make the copter return, it flipped slowly over one axis and crashed on ground but not like an ESC has gone out of sync.
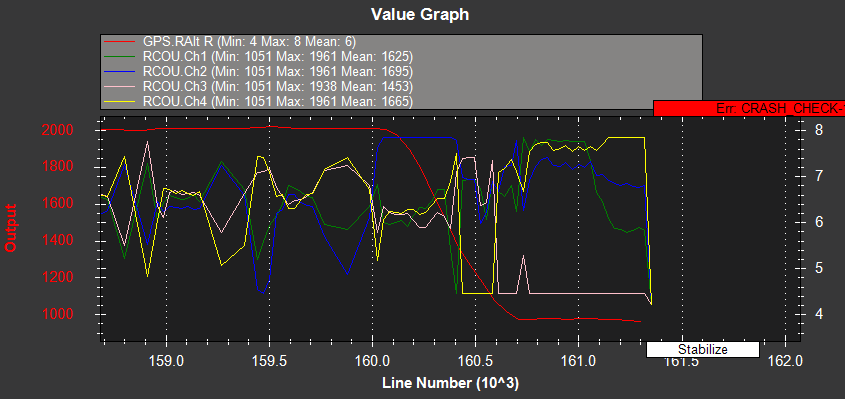
I tried to simulate and could reproduce it again. When I put the pitch + roll stick completely back and left, the copter slowly flipped over motor M2 (Mission Planner motor C) and went down.
To me personally it looked more like a wrong PID setting… he is flipping to much than he loses height and fells in the corn field. I tried again putting pitch completely forward + roll to tel left, and it did the same flipcrash over Motor M3 (Mission Planner motor D)
So Im wondering what the issue could be and if anyone can understand from the log what happened.
Log Download:
http://files.viramedia.de/2016-09-13_09-28-12.bin
I would really appreciate your help
Thank you very much in advance
Igor