Hi all.
Curious if anyone knows hat scale Arducopter uses to measure temperature on ESC’s via BLheli telemetry. I assume its Celsius but want to make sure. I have been running a set of Tekko 65 amp ESC on a larger copter and see the temp gets up around 100 degrees. IF it’s C thats pretty hot, if its F then its barely warm.
If it is C is that temperature to high. I don’t know what the norm is…what people might be seeing on their machines.

H,
the temperature should be in degrees Celsius.
How much current gets through an ESC?
I figured Celsius.
I am drawing maybe 15 16 amps and 85C.
In my mind they are running hot.
That’s a pretty high temperature for such a small current. That’s odd.
These are ESC inside the arms so not a lot of airflow.
Yea definitely C. I was doing some flying today (~6C). It was powered up in the house for a bit and then it cooled off outside until some current got flowing. But this is a high capacity 4in1 compared to the meager amount of current required to fly this quad.

So I am pretty convinced then I have a heat problem.
Ok something else to work on.,
Just I would have thought an ESC capable of 65 amps would have run cool at 14 amps.
Here is the other thing I don’t understand.
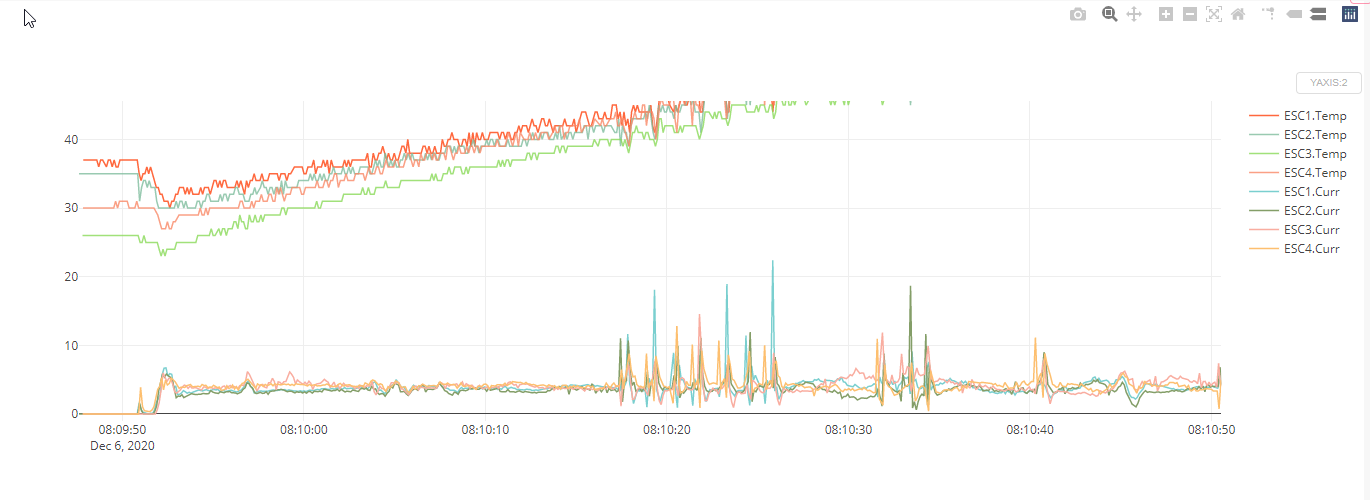
This is the graph from a flight the other day,
You can see that the temperature measurement starts at anywhere from 26C to 37C. But this is outside in +5C. The machine is powered up and left for 5 minutes to capture GPS and to settle down.
Then off she goes.
Yet the ESC are hot as soon as it’s armed…that doesn’t sound right to me.
@rickyg32 i’ve noticed those temp readings on my esc (wraith32 metal v2) too with some concern a while ago and started investigating. i’ve come to the conclusion that, disregarding the numbers, this is nothing to really worry about. imho that’s the f051’s internal temperature reading that does not really reflect the esc board temperature.
i’ve added an external temperature sensor and found while the internal blh_temp reaches 80°C, the board won’t actually heat up noticeably more than 50°C under relevant load.
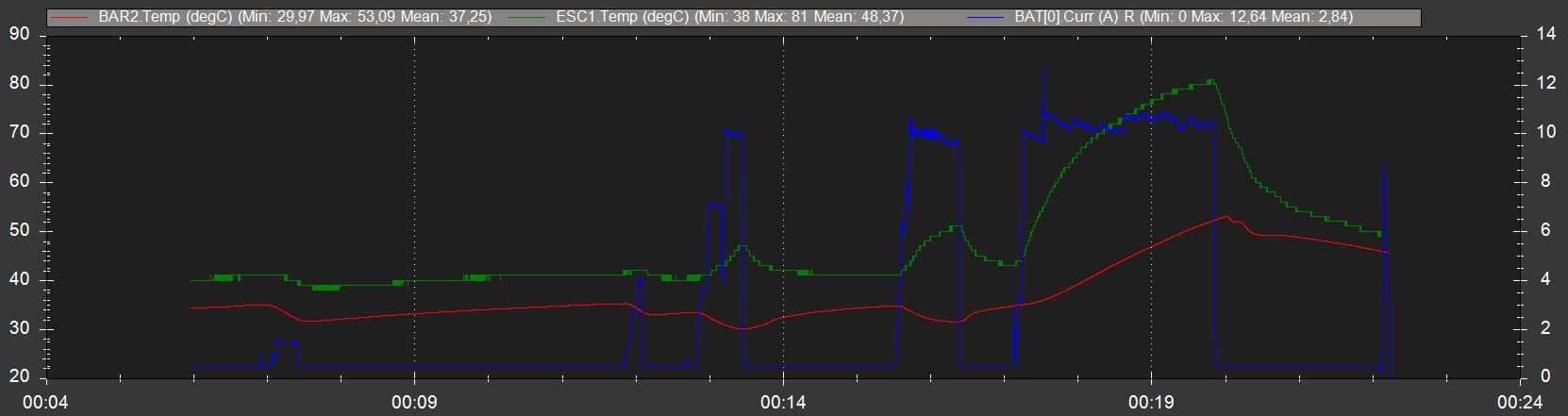
another local forum suggesion was the ESCs maybe would’t cope too well with running partial load over a longer time due to the FETs’ switching losses on pulse modulation phase shifts. i couldn’t back that suggestion with numbers though, and i as to my understanding the modern escs’ fast FETs do likely not have that issue. plus they’ve been performing great running at 30-50% throttle over hours on cruise flights. here’s my temp vs throttle reading:
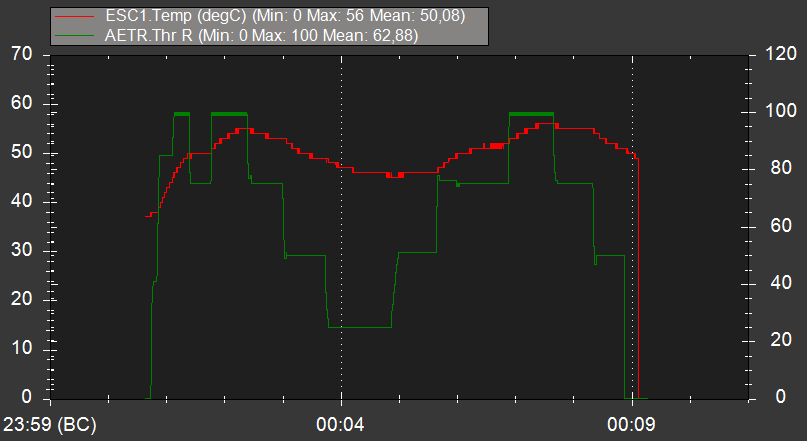
additionally, in blheli suite the preset default cutoff (reduce power) temp is 140°C! so we’re most likely pretty much on safe ground here. even with my blheli_temp reading reaching 100°C, my “finger probe” reports the esc board warm, but surely not really hot. so finally, i’ve decided for myself there’s nothing to worry about as long as i don’t look at the blh_temp readings too closely… 
So results of this mornings flight.
i am leaning toward it being erroneously reporting.
Here is the temp versus current before the experiment.
Here is the start up temperature this morning.
The machine sat in the garage all night…It’s 11c in there so the starting point of the temperature should be low…one would think. But no check this out.
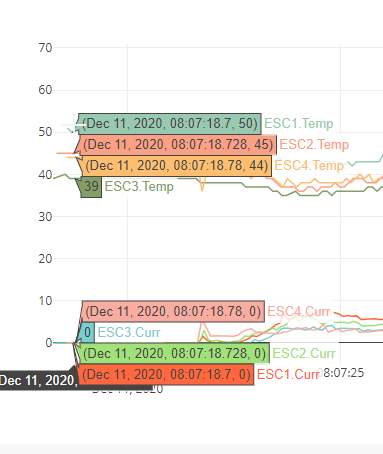
The temp starts between 39C and 50C…the machine sat for no longer or shorter a time that is normal. But the frame started cooler, that might explain some of the vibrations as well.
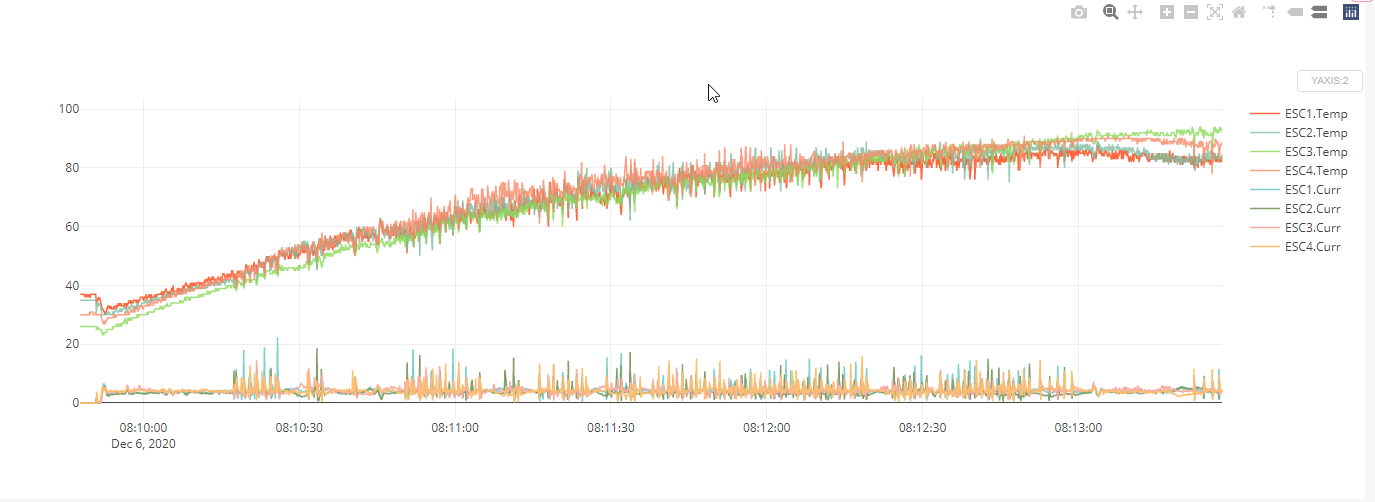
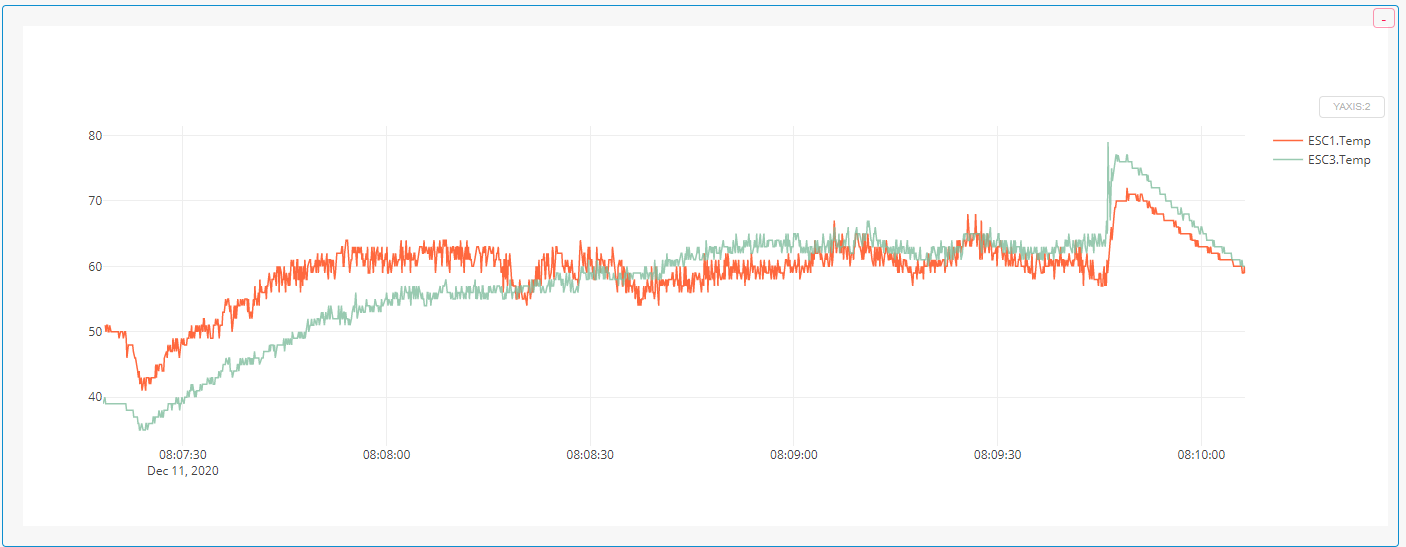
Here is the temp for each esc for the total flight
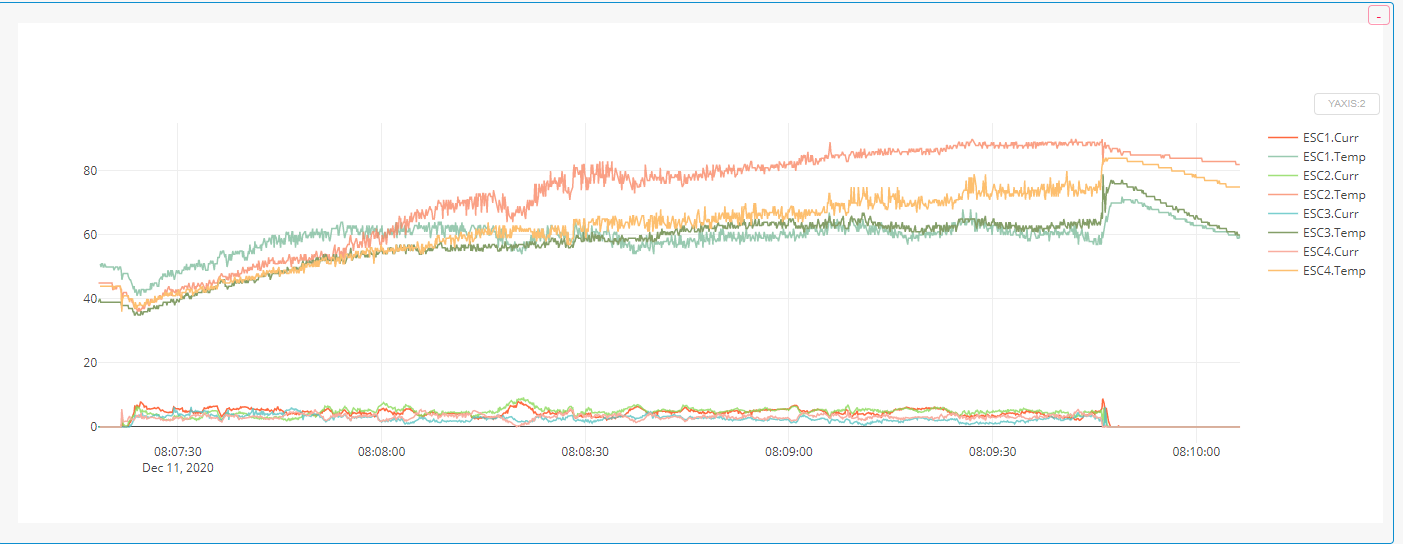
This time didn’t get over 90C according to the telemetry.
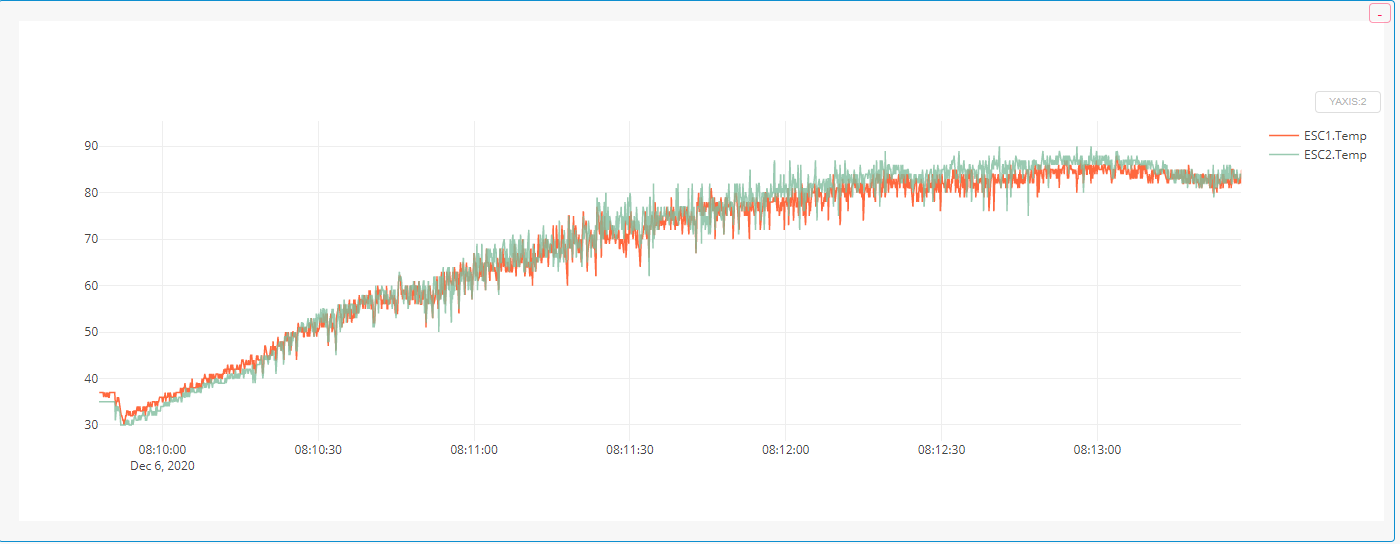
Here is ESC1 and 2 before the experiment not how the temperature is pretty much the same for both.
Here is 1 and 2 with 1 having the air scoop end cap. There is a difference in temp between the two with the scoop ESC running cooler.
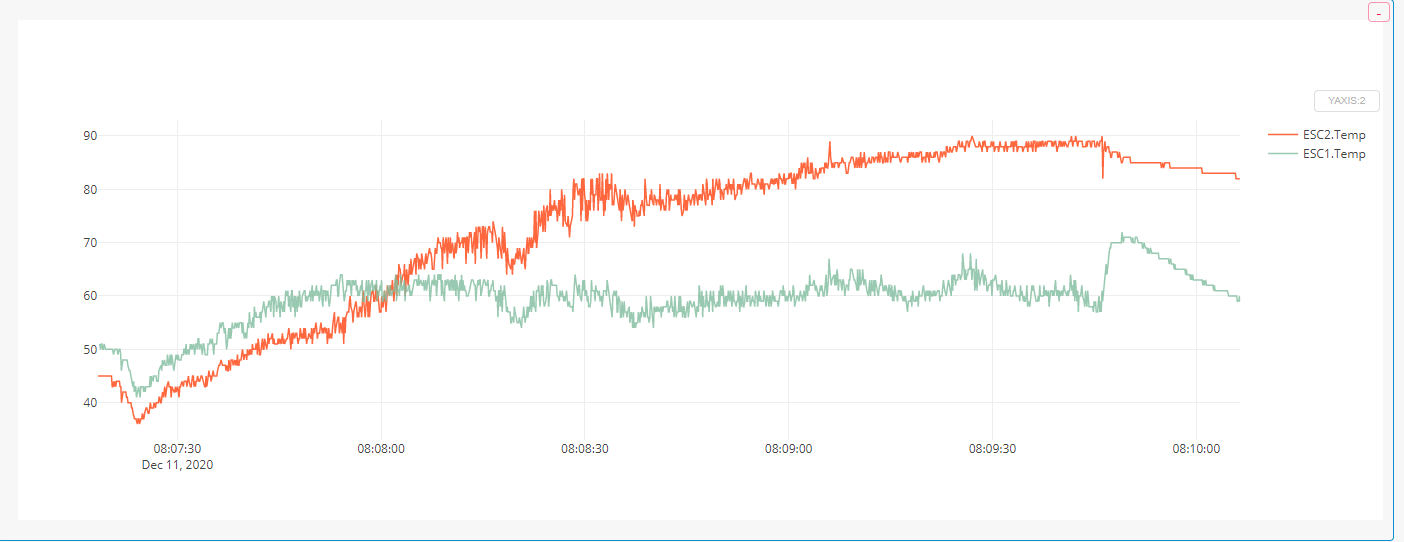
What’s odd is motors 1 and 3 have nearly the same temperature profile but one has the air scoop and three does not.
So my conclusions are…I suspect that the temperature measurement is really not to be concerned with.
Oh and Loiter was a disaster. I think I need to do some compass work but that’s going to wait till I get the mods done. Also Yaw tune was a failure…not sure why yet.
![]()
12-11-2020 Logs
Shared with Dropbox
I also see the machine would benefit from further tuning. So perhaps I will go back to Roll and Pitch to see if that helps improve the yaw tune.
How did you add and additional temperature monitor.
it‘s a simple BMP280 type sensor board attached as a secondary baro (I2C). i usually use that for outside temp assessments.
Interesting.
So I could put one in the arm on top of the ESC for instance and monitor the temperature as an experiment. See if temp is really affected. That said, if I could somehow just check the temp once it lands that would be helpful but no idea how that would work.
Hi Basti vierfuffzig,
after reading your comments I purchased some BMP280s and connected it to the Ardupilot using a Racerstar F405 Wing Nano FC, to the DA1 and CL1 connections, supplying it with 3,3V, but without success.
On the OSD I can display the IMU temperature, but the other two options ATEMP and BTEMP display only “–” and “0” respectively. When I connect the BMP280 the A- and B-Temp display does ot change, instead the board / IMU temperature gives crazy with numbers like -137 degrees. Also the displayed altitude suddenly is something stupid like -2237 meters, changing constantly…
I also tried the supply with 5V. Then tried to switch the DA and CL lines. Also tried the DO and CS connections in my frustration, but nothing works. Also tried another BMP280, in case the one I used was faulty, no luck.
I use VTX on 5,8G.
On another plane I used a simple temperature sensor with INAV on the Matek 405 sucessfully, with the same VTX setup.
I use Arduplane 4.1.6. I also tried all possible combinations of the parameters “BARO_PROBE_EXT”, “BARO_PRIMARY” and “BARO_EXT_BUS”, no success.
And I guess “GND_PROBE_EXT” does not exist in Arduplane anymore and is now actually called “BARO_EXT_BUS”?
Would you have tips to get it to work please - thank you! 