Yes same address. KakuteH7 mini is 20x20 ![]()
1 Like
Thank you Andy for this helpful blog.
I am trying to tune my chimera 7 and having trouble with center stick sensitivity on acro.
in addition, copter seem not to hold attitude very well in acro…
Can you please point me to what params i should change to improve that?
Been searching for answers for a few day now and couldn’t find anything…
Thanks
1 Like
Just read all this what a great blog may do a 5 or 7 incher for a winter project but I loves my Hexsoon 450 EDU and if I get the A* gimbal to work/perform well then will be happy chappy,you must be proud of this Andy
Center stick is controlled by ACRO_RP_EXPO, ACRO_YAW_EXPO and RC1_DZ, RC2_DZ and RC4_DZ depending on axis.
Attitude control is all down to the tune - better tune, better attitude holding
Hi everyone,
I’m facing some issues in the initial stage of configuration.
In Alt mode, the drone keeps on oscillating front and back(pitch forward/backward) and in Loiter mode it is rolling.
I have attached the equipments I used in this project, the full parameter list and the logs from the 3 test flights.
Frame Type: Chimera7 Pro V2 6S HD
Flight Controller: Mateksys H743-SLIM V3
Motors: iflight XING2 2809 Cinelifter Motor
Electronic Speed Controllers (ESCs): iflight BLITZ E55 4-IN-1 ESC
Propellers: Gemfan LR 7035 2-Blade Propeller – 5mm
Battery: CNHL Voltage 14.8V 4S Lipo Batteries
Radio Transmitter: Radiomaster tx16s transmitter
Receiver: Radiomaster RP3 ExpressLRS 2.4ghz Nano Receiver
GPS Module: Mateksys GNSS & COMPASS M10Q-5883
Parameters List:
Logs:
Thanks,
Nithishkumar
Looks like a tuning problem. Did you follow the tuning guide? Tuning Process Instructions — Copter documentation
You don’t have ESC telemetry - going to be hard to get a great tune without that
For my first test flight, I didn’t follow the Tunning documentation properly. I reverted everything and made some basic changes for loiter and altitude mode, and the test flight was successful. Now I’m working on making those tuning changes. And also planning to replace my current ESC with the T-motor F55A PROⅡ•F3 6S 4IN1 esc.
I’m stuck in the current calibration phase. can you please help me build the xt60 connector wires for current calibration, I’m facing an issue in connecting the banana cable to the multimeter. Can you please share a clear picture of your current calibration setup and name the components.
I have attached a picture from your video for reference.
Thanks,
Nithishkumar
One of the cables is a passthrough - it should go straight from the battery to the copter, the other goes via the multimeter
There is “poor mans approach” approach to current calibration (not everybody has a multimeter that can take more than 5-10 A)
Guess a first value (in some cases the esc data sheet or other sources will give a value also),
Charge a battery fully, fly as long as reasonable, charge battery full again, find total mAh consumption from logs and compare.
Calculate new constant based on charged mAh divided by logged mAh.
After two, three iterations you will have a pretty good value. Of course there are traps, for example if there are current consumers that bypass the main line, if it is a very unlinear current sensor etc.
Hi @andyp1per
In your video “Ultimate Autotune” you set FLTT values to 0

In recent videos on setting up 6 inch drones, you left FLTT by default value.
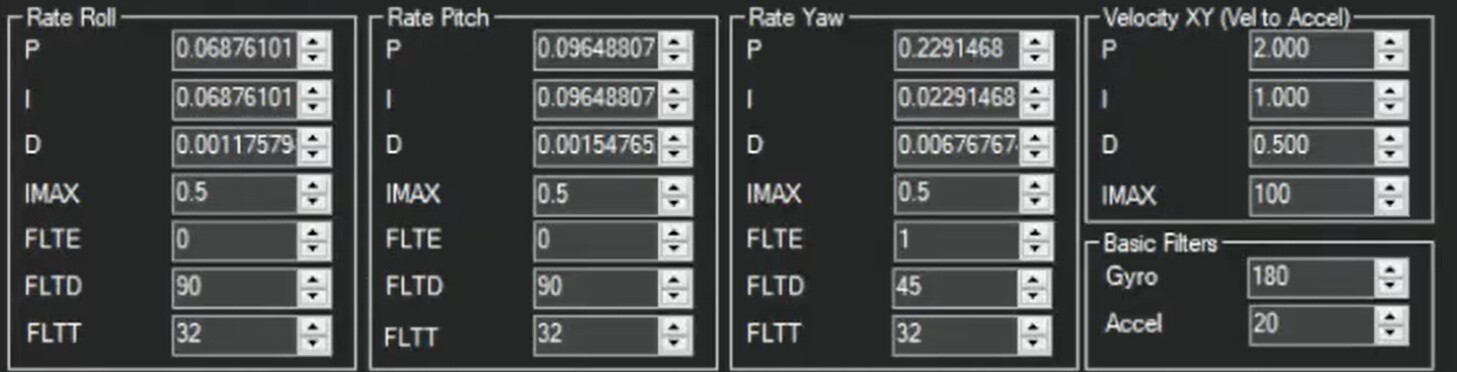
Please tell me which rule is best to follow to configure this parameter (FLTT).
I’m setting up now iFLight XL10 V6.
FLTT is essentially the filtering that pilot input and EKF control receives. There used to be an issue with autotune where it wasn’t set to 0 during twitches but that is now fixed. Generally I would say a value of 30 is probably appropriate for most copters.
17.4k views, LOL - I guess people like this stuff ![]()
3 Likes
Appreciate a lot for the very helpful instruction.
@andyp1per Can redistibuite your parameter files as templates in the ArduPilot Methodic Configurator under the GPL3 license?
Thanks!!! I will drop you a line once they are integrated in the software.