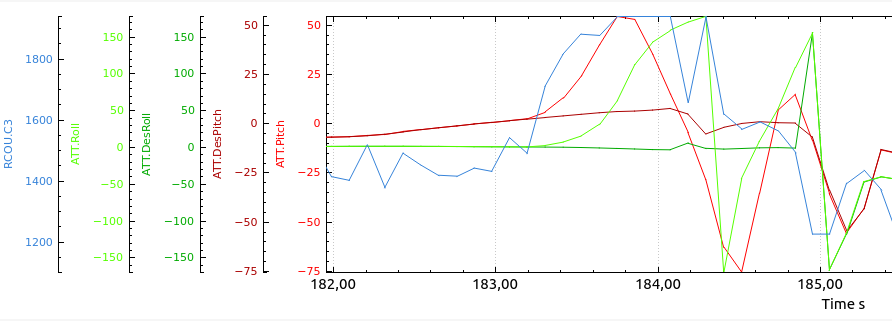
the log confirm what you say. Why it happened, is not clear, what is clear is that flight controller commanded more thrust on #3 , but did not receive.
It is quite clear that your # 3 motor failed. At the same time as #3 goes full power, the opposite motor, #4, goes to zero and the copter losses attitude control consistent with this. Why it failed, esc, connector, or motor winding is for you to determine.
The Pixhawk is actually hard mounted, and the airframe in general is extremely rigid, but extensive care was taken to balance out the motors and propellers, prior to mounting them.
My experience with soft mounted motors mostly lead to fatigued grommets which only make vibrations worse. (DJI S1000).