I am making a pixhawk boat which has two motors which would I want them to work in a differential mode as I donot have any rudder.
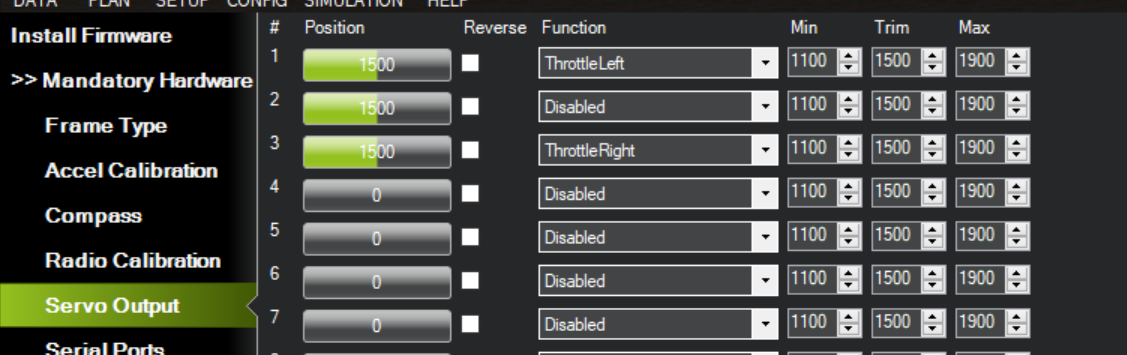
In the configuration setting I set the class to boat. changed the output to type of servo to throttle left and right. I didnt connected the battery and just wanted to see if I get any movement of the bars in the servo output. I armed the boat but the throttle bar didnt moved with changing throttle. The green bar stayed the at the same position as shown:
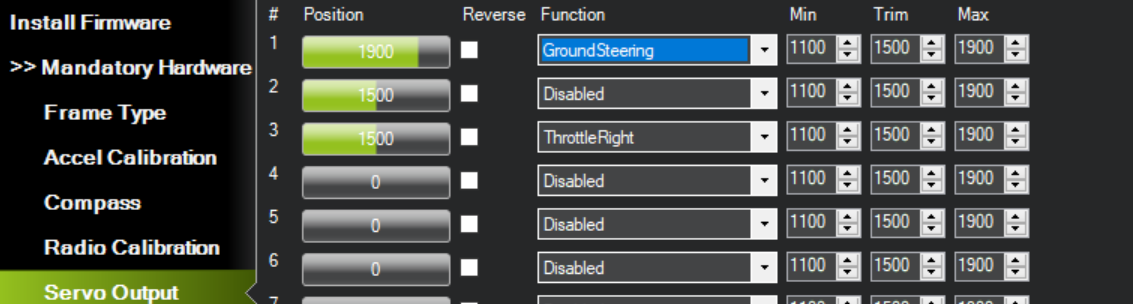
Changing the function to ground steering allowed me to change the green bar. Why isnt it working with the throttle??? Kindly help me in case I am missing something.
Hey @m_farooq I have the same problem now. I have turned of the safety switch, my robot is in manual mode and only ground steering works and not throttle left or right. What other settings did you use ?
Thanks for the reply @Yuri_Rage. The issue was in the mode selection. I needed to have it in acro mode and not manual. I armed it as well but the robot does not work today. when I tried the same settings yesterday it was working fine. What can be the reason for that.