I am trying to make an autonomous boat that could run on the Pixhawk 6C autopilot.
For that, I have the following components:
Pixhawk 6C autopilot + GPS M8N + PM07 Power Module
RC Flysky FS-i6X bound to receiver radio FS-iA6b, both communicate with PPM.
T200 Thrusters x2 (for skid steering) with basic ESC from blue robotics
RFD900x radio (for telemetry and longer range)
Battery Li Ion 20V 5Ah (not ideal to run the thrusters as 20V is the upper limit of operation delivered by the constructor, but it is an intermediate solution that works for now to test the setup).
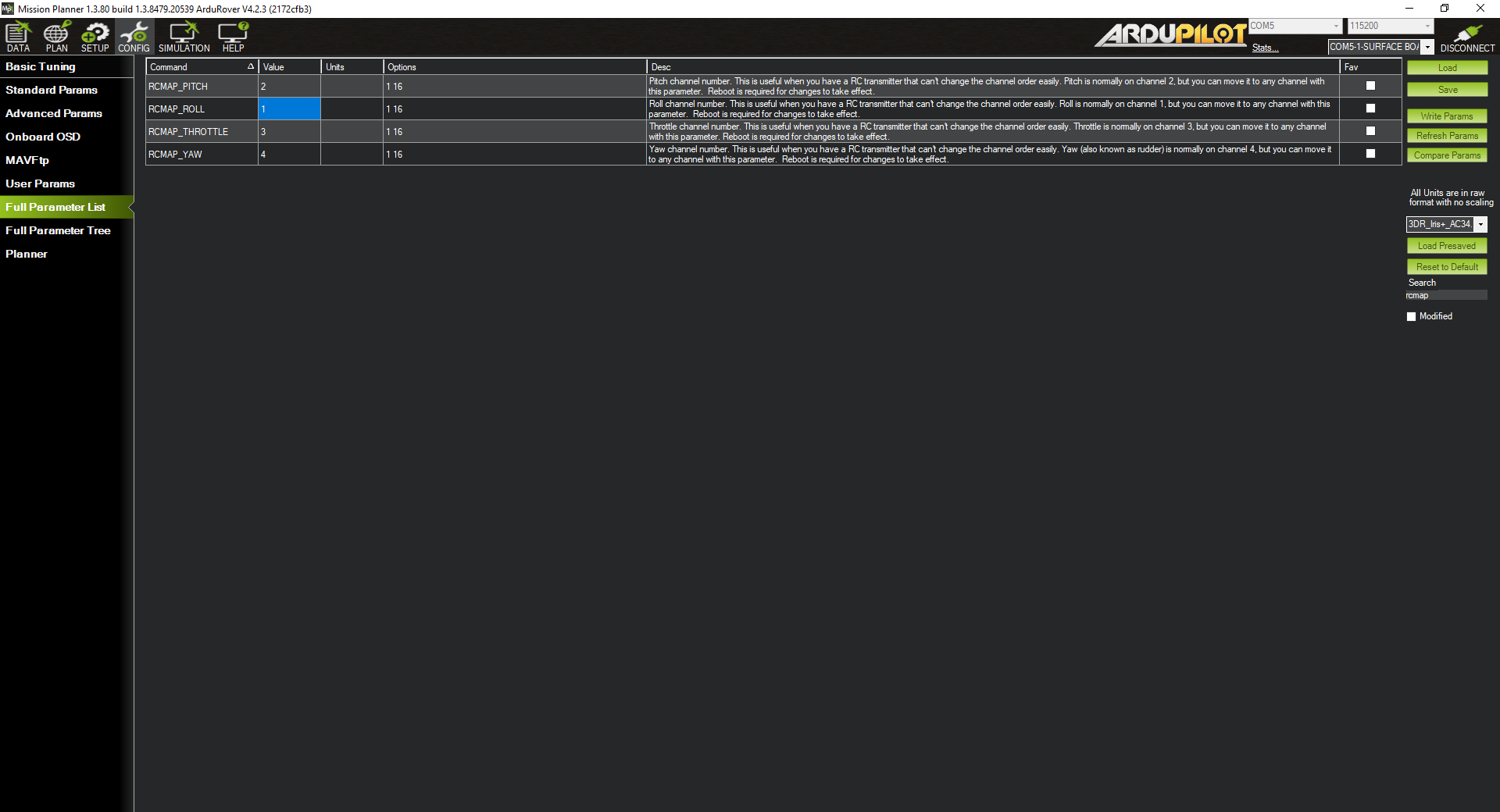
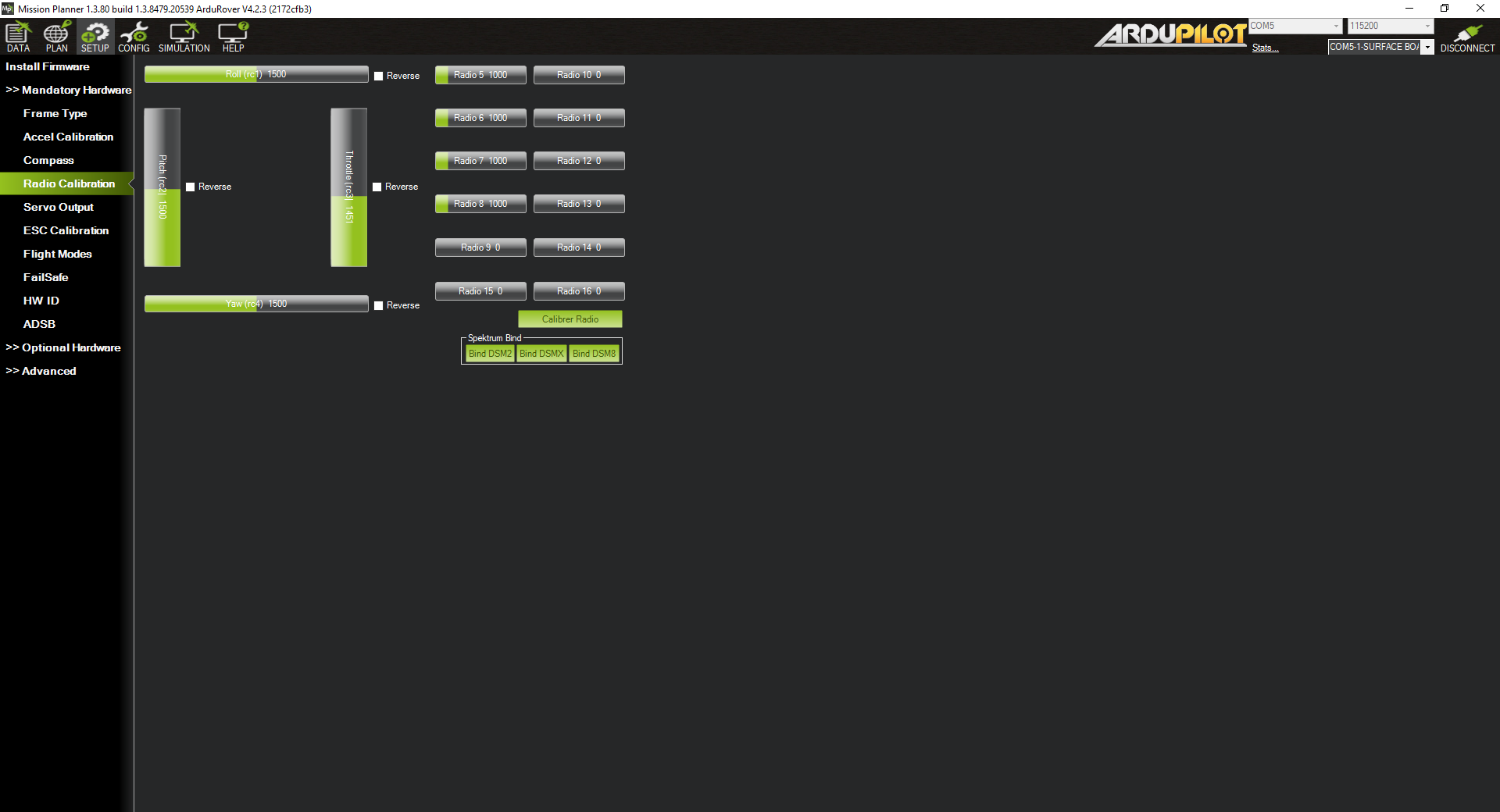
To set-up the skid steering, I applied the following procedure (second part on R2D2). If I do that, the thrusters seem to never get the signal from my remote (even in MP, under servo output, nothing moves when I move the knobs on the RC). However, If I change these channels to “RC PassThru”, I can control my motors (but independently instead of having them steer the boat).
Does anyone have any idea why my thrusters don’t want to steer? I am indoors, so not getting any GPS signal, could that be it? I tried taking it outside yesterday, but I couldn’t get it to work there either…
I am new to arduboat and some insight would be greatly appreciated!
Sorry for the delay and thanks for the replies! I actually did not know how to get the .bin file, and as I have no GPS (testing indoors), all my files have the same date, which makes it a bit tricky!
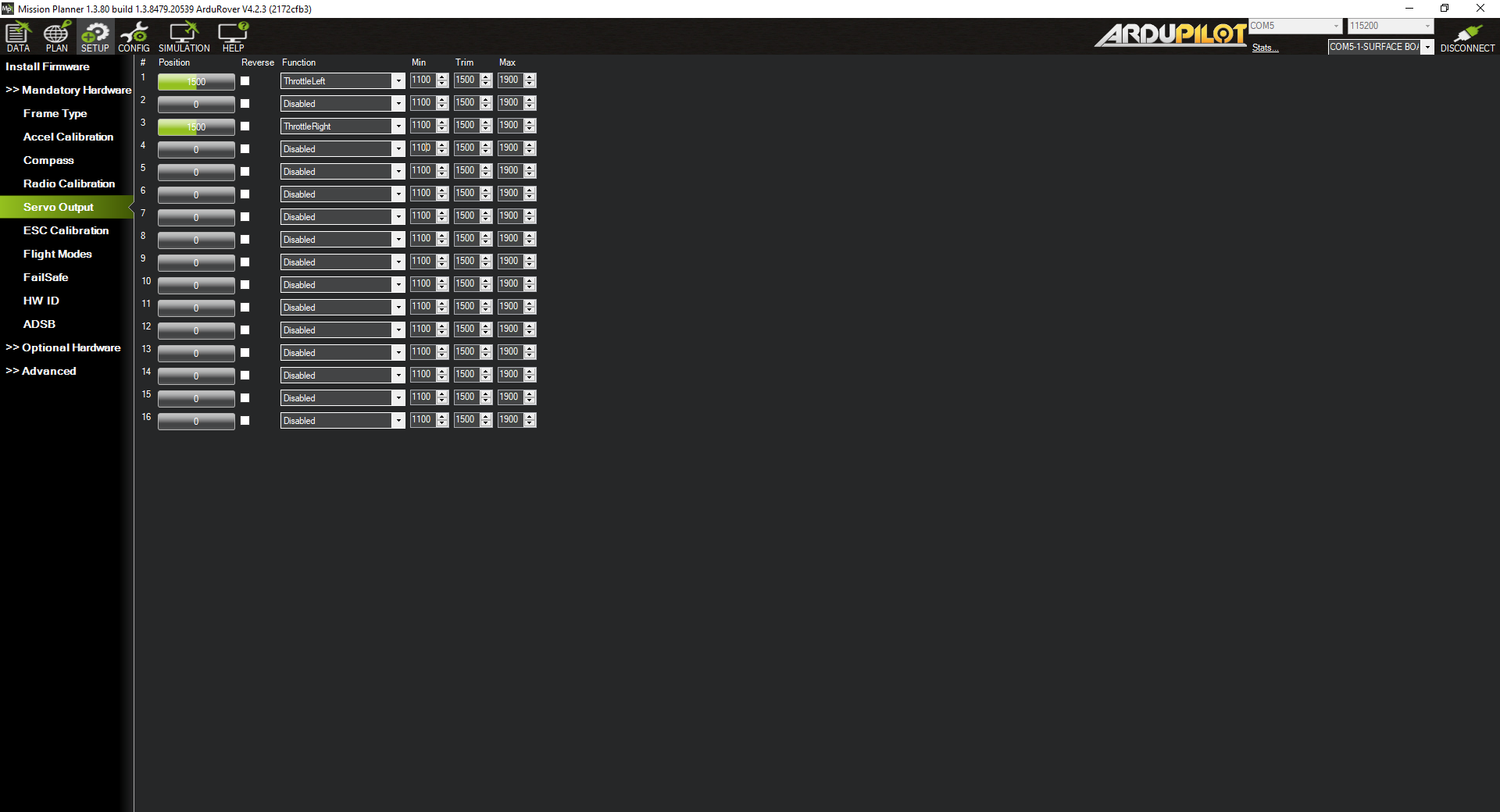
As it turns out, I rebooted everything and ended up getting a signal in the servo output tab (and my motors were spinning, but they were spinning in full reverse speed, which did some damage…).
Each time I unplugged and replugged my battery, the values for MIN, MAX and TRIM in the servo output tab were reset to MIN = 1000 = TRIM and MAX = 2000, instead of being (respectively) 1400, 1500 and 1600 as I had them set (for testing purposes, I wanted my motors to run really low).
I did some testing and found out that by resetting MOT_PWM_TYPE to 0 ‘Normal’ everything works fine. I had it set at 6 ‘DShot300’ following an online tutorial for setting up the Pixhawk 6C.
I don’t fully understand where that issue comes from even after trying to research on the different PWM protocols.