hello everyone, i made a boat fish finder, on mothers f405 std i already made drones on this board and there were no problems. I downloaded the stable-4.1.5 version, everything has been configured according to the official website of arduboat, I have a problem with the LOITER mode, in manual mode everything works, you can swim but in the loiter I do not work the RC control, the boat keeps position. In RTL mode, the boat does not go home, I know that it may be caused by wrong tuning settings. I would like to ask for help because I am already sitting for this week and I cannot understand why this is happening thank you. Log below
Hello, I checked what you wrote and everything works on the motor test and these parameters SERVO1_FUNCTION = 26 (steering)
SERVO3_FUNCTION = 70 (throttle) it was, but I changed it because I read that this album has such PWM outputs
S1 PWM1 TIM3
S2 PWM2 TIM8
S3 PWM3 TIM8
S4 PWM4 TIM8
S5 PWM5 TIM2
S6 PWM6 TIM1
Motor can’t share same TIM with servo. I did the ground tests without water and it seems to be the same as it was
If the motor and steering are working in the motor test then I don’t think it is necessary to move the outputs around… but are you sure that the motor is spinning in the correct direction during the motor test?
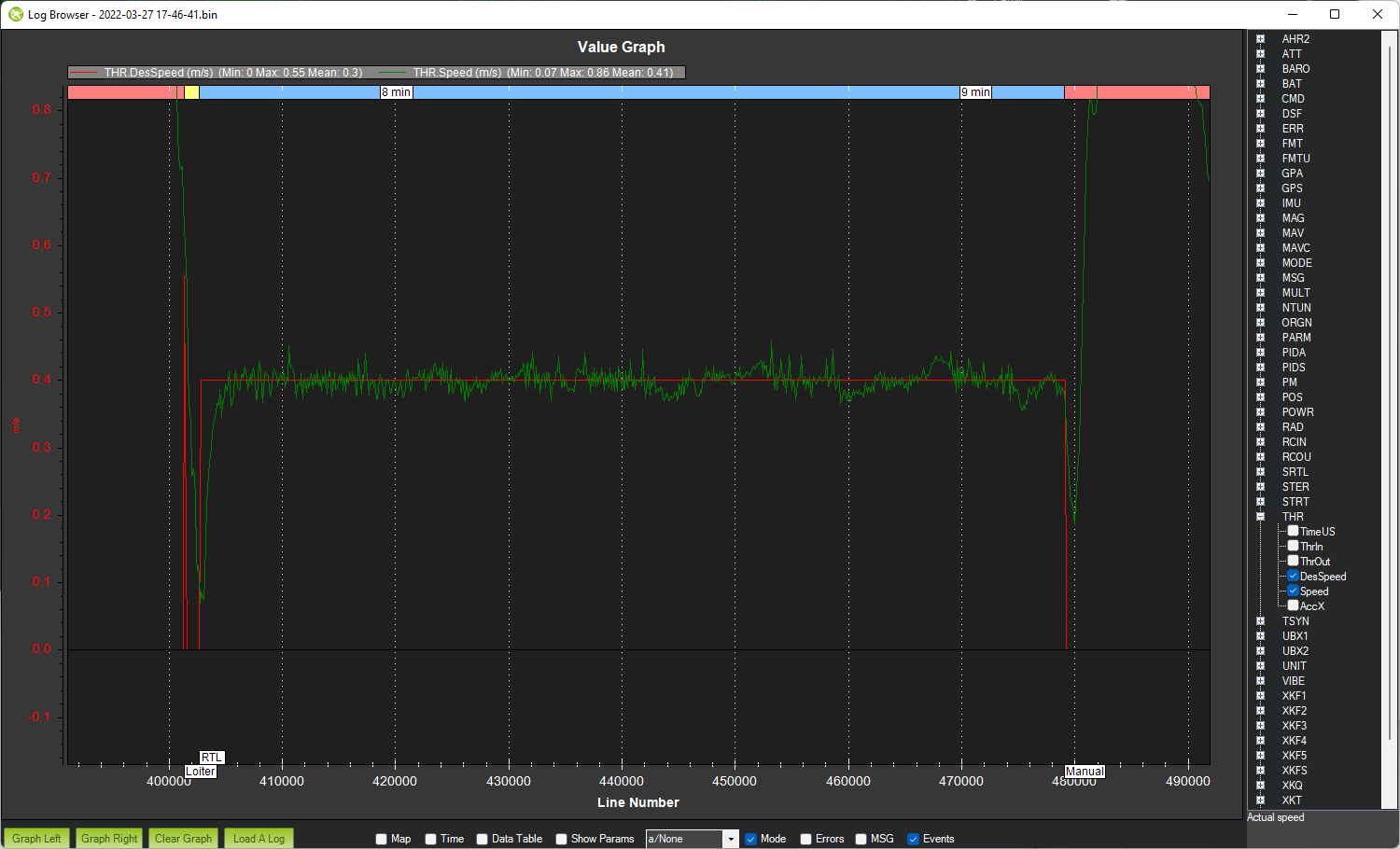
It seems that the speed controller is working for the period that the vehicle is in RTL mode
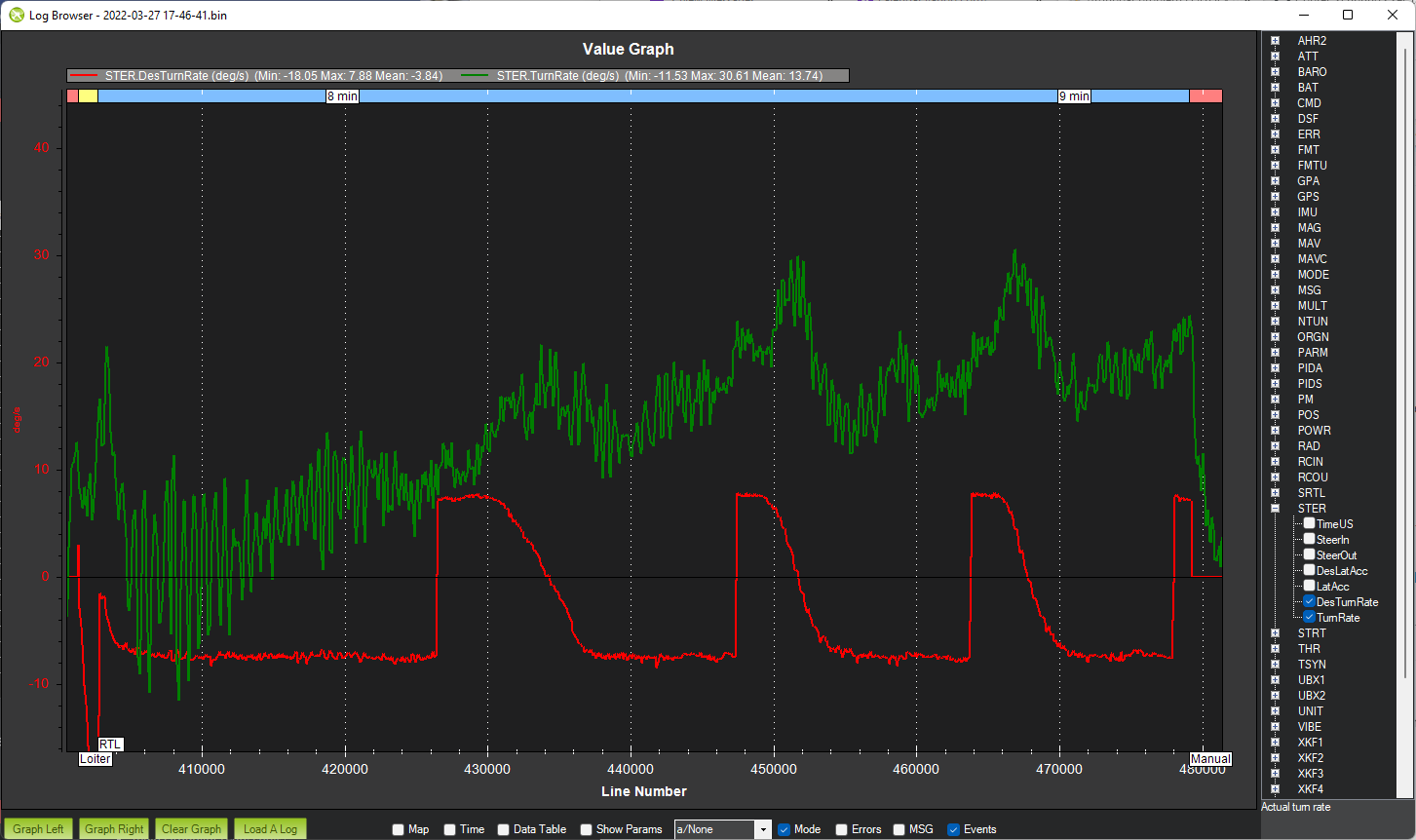
The steering control does not seem to be working though. Here is the desired turn rate vs the actual turn rate and we can see the actual (in green) is not following the desired (in red) at all.
If we plot the servo output 1 (ground steering) vs turn rate there doesn’t seem to be much relationship. We see the steering servo goes all the way to one limit (1100) but the turn rate remains just floating around between 0 and 20deg/sec.