I would like to connect 2 relay switch module to pixhawk rover firmware 3.1.1 and I would like to use FS-i6S transmitter SWA and SWB to control a relay to on off LED light,
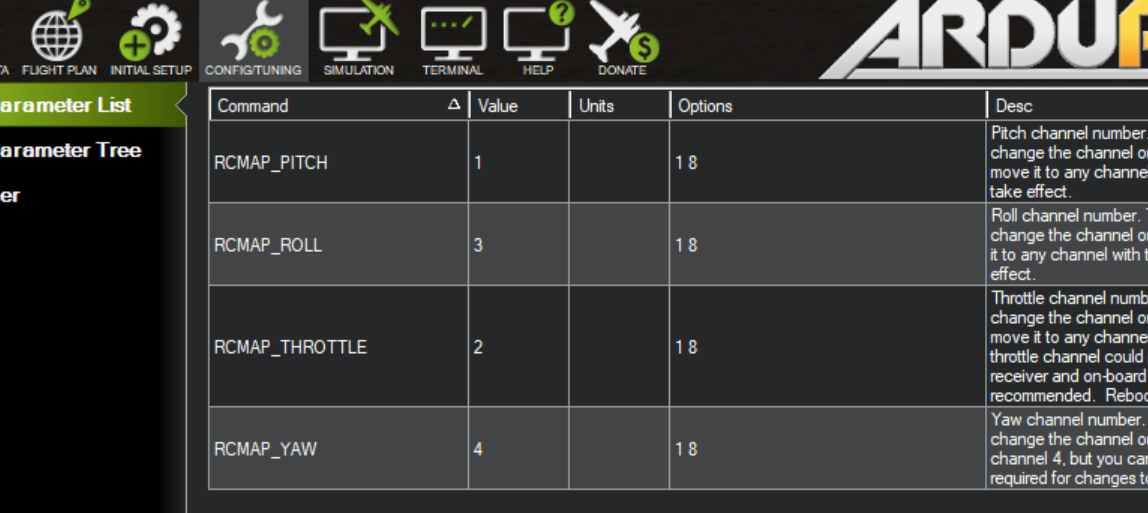
current your mapping aux out 5 and 6 to be both relay and servo output. To get just the relay output you will need to set SERVO13_FUNCTION and SERVO14_FUNCTION to 0 for disabled.
Then to allow the aux pins to do something other than pwm out you need to reduce the brd_pwm_count parameter to 4. ie out of a possible 6 4 will be pwm and the last 2 are now free to do relays.
it looks like there is no option for relay one, i guess its reserved for motor direction changing with dc motors, so you may have to adjust your settings to use relay 2 and 3.
RCx_OPTION is for inputs to the flight controller from the rc receiver.
SERVOx_FUNCTION is for outputs from the flight controller via the servo ports.
You may have to flash a beta or latest (master) release to get RCx_OPTION, if its not in the stable then it is still the old ch7_function and ch8_function. The old parameters should have the same options, there just available on fewer input channels.
Yeah there is not servo output function to a relay because a relay does not take a servo type pwm output, relays are setup using the RELAY_PIN parameters. You will have to disable pwm and reduce the brd_pwm_count for the aux pins in order to disable there servo outputs and allow the relay functions to use the pin instead.
I have connected a relay switch module to pixhawk (rover firmware 4.0.0) and I can change it with dedicated buttons of the Joystick, but I would like to switch it with the same buttons I use to arm and disarm the system.
Could you help me configure the parameters to do that?
I have a RoboClaw 2x60A Motor Controller wiring to a Pixhaw to control two trolling motors.
I only have got to work ok with analog signal setup on BasicMicro Motion Studio and also I need to deselect the mixing option. I thought it must be setup as RC signal but it doesn’t work at all.
On the other hand, I have a couple of extrange things…I must to set the MOT_SAFE_DISARM = 0 (0:PWM enabled while disarmed 1:PWM disabled while disarmed) because if I set to “1” the motors run at high speed when disarm the system…
The motors Works ok (tank style) but I need to select PILOT_STEER_TYPE = 0 (0:Default 1:Two Paddles Input 2:Direction reversed when backing up 3:Direction unchanged when backing up) instead of “1” as seems the correct option.
Further, when I switch off and on it seems like the Roboclaw loss the saved setup or something like that because I need to connect (usb connection to PC) and select/deselect the mixing parameter and it Works fine again…I don’t understant what happend…
I have Rover 4.0.0 and the motors are wiring to servo1 and 3 with 73 and 74 servox_function
The idea is to control a boat in Skid Steering mode. the motors are used to turn the boat, aditionally I have a big motor managed by a 3 phases speed frecuency regulator connect to servo2 output setup as 70 (Throttlle) by a PWM converter and it Works fine when I control the system with the Logiteck joystic. No test in auto mode yet.
The main question here is Why Roboclaw doens’t work if I select RC control, that means the motor doesn’t move at all. If I select Analog control, I can control them via telemetry by Pixhawk otuput as I explained above, but it seems the logic option must be “RC control” because the Pixhawk can’t take out analog signal…so I am afraid the “extrange” problems I have are due to selecting “Analog Control”, even if the motors seem to work…
It’s long time for I’m back to this forum and now I hope you are done already , I’m back to this forum and I will start some project with rover and boat again.