Hi,
I have built a two thruster Arduboat . It works well in Manual mode , but Not following a straight line in between waypoints even with RTK GPS lock in AUTO mode.
I have attached the Tlog file, parameters and screenshot of the waypoint navigation . Can anyone help me to solve this ?
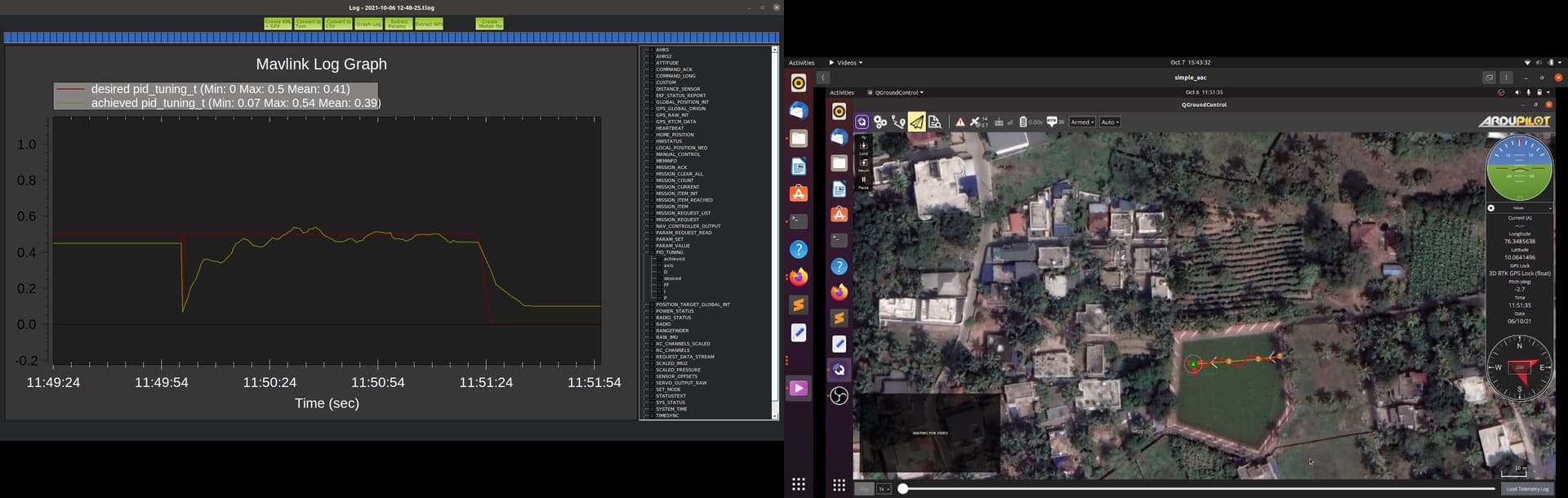
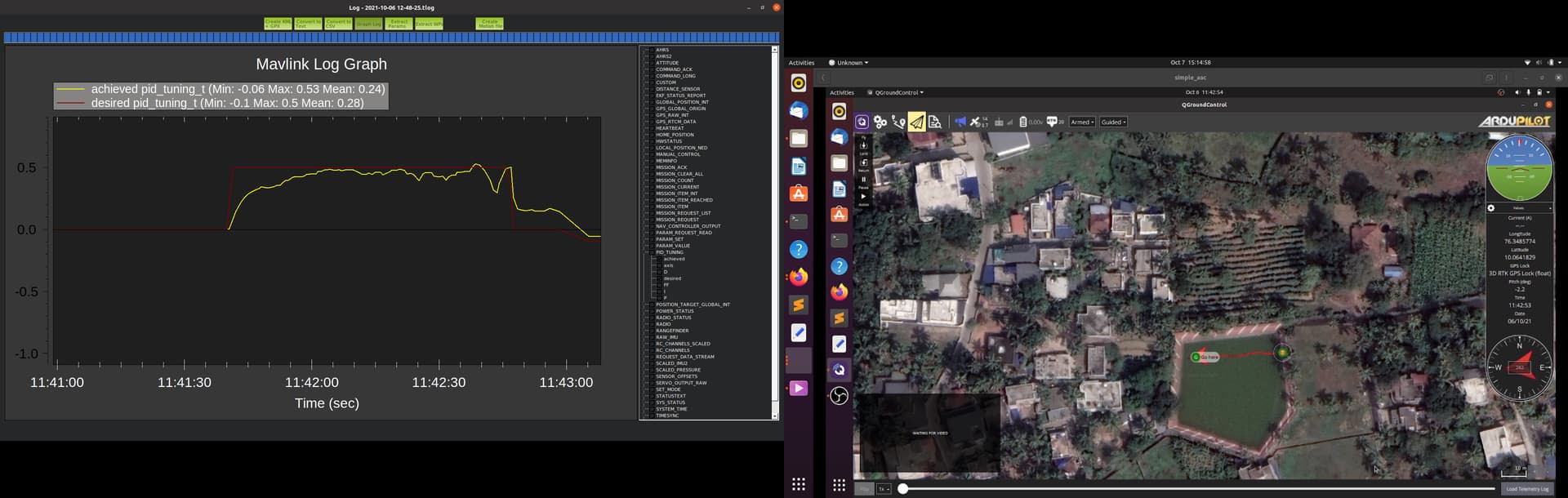
Hi ktrusser , I have plotted the tlog file PID values for two conditions. Can you say which PID parameter should I change in order to get the best result?
You need to follow the tuning documentation. Those images do not contain enough info for us to help. The link Kenny gave you has outstanding information. Follow it line by line, and be careful not to miss a step. If it confuses you, come back here and ask for some clarification.