Hi,
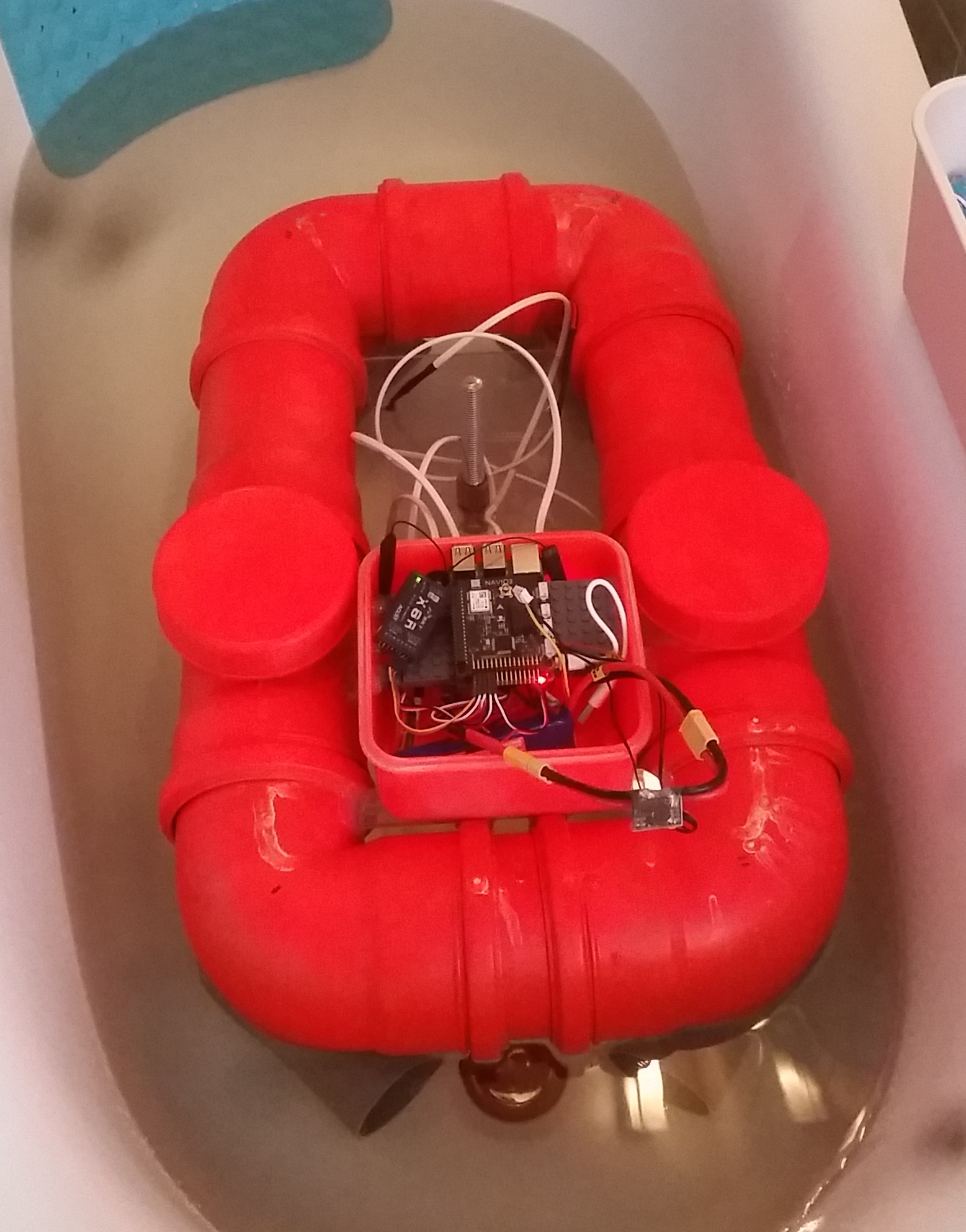
I have a “floating device” that i need a engine configuration for, which also supports Ardupilot.
Its task is to stay put in a given position (e.g loiter with manual stick input) and only need to counteract for wind, current and possible small movments or adjustments in position.
It also need to be able to navigate in all direction with turning it self.
Any input on the part and engine config. recommandation that fits Ardu would be great.
Yes the X config works, but the lateral functions (moving sideways) only work in manual mode.
Auto and Loiter still work but still uses the L1 (normal Rover) controller, no lateral movement.
Hopefully these extra functions in Auto and loiter are coming, so we can take full advantage of lateral movement.
With tuning Loiter and Auto still preform well as the boat can turn very tightly, so it is worth building the X config boat and waiting for the extra functions.
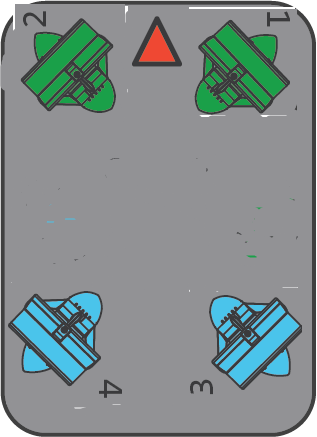
Ardurover 3.6, four thruster in Omni X configuration.
Probably need to swap CW to CCW props.
Question is, what is the default stick layout for steering this configuration?
I have mode2 tx with throttle/yaw left and pitch/roll on the right, but this is not the wanted setup.
All steering with throttle should be on right stick and yaw on the left, right?
Right now the “boat” moves but not in good way hehe.
Also, is there a description on how the Omni config is coded to move the vessel?
E.g moving forward, is all thruster working towards the direction or are the rear ones pushing and the front ones controlling the heading/yaw?