Hello all : This is my recent water survey proyect , is designed and developped from 0 , there´s few pictures. Two T200 Thrusters and Garmin Echomap Plus 62 with TH20 Transducer
I have connected the Garmin serial rs 232 output through max 232 ttl converter at serial 2 port of the Cube 2 ,
The settings that I have is :
SERIAL2_BAUD 4
SERIAL2_PROTOCOL 9 ( sonarrange )
RNGFND_TYPE 17 ( nmea )
RNGFND_MIN 20
RNGFND_MAX 20000
RNGFND_ORIENT 25 ( down )










3 Likes
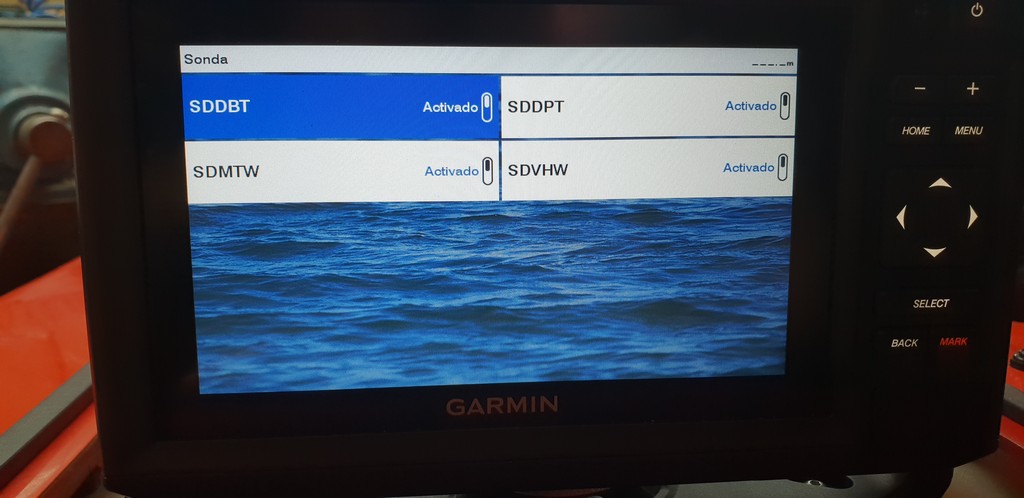
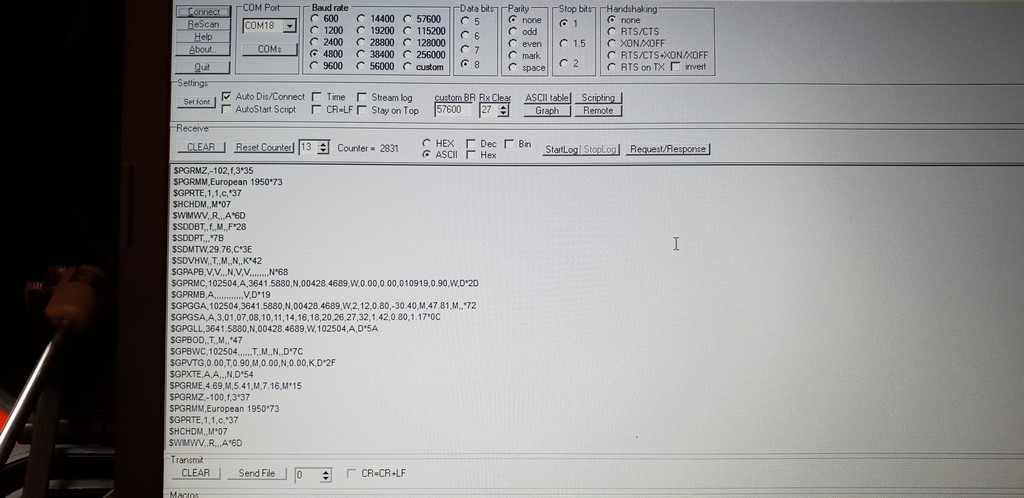
Garmin Nmea sounder settings is possible in various modes , I active all and receive this Nmea data in a terminal for test only .
Next step is go to the dam to check .
Rgds Antonio Medina / www.antrack.es
1 Like
That’s a beautiful build! What is your hull made of? I would enjoy knowing the details. Looking forward to hearing how it performs! Thanks for sharing!
Hello ktrusell the hull is fiberglass made vac compacted in fiberglass moulds.
1 Like
Very ligth and strong
1 Like
Hi! what a nice work!
I’m workin on something similar, in fact I’m starting to look at echosounder. All ecosounder have the nmea output? Is there a sensor that don’t have a screen but the nmea output?

Yes the echosounder have NMEA 0183 output , at 4800 baud .
1 Like
very nice! if you take a video some time I’d love to see it.
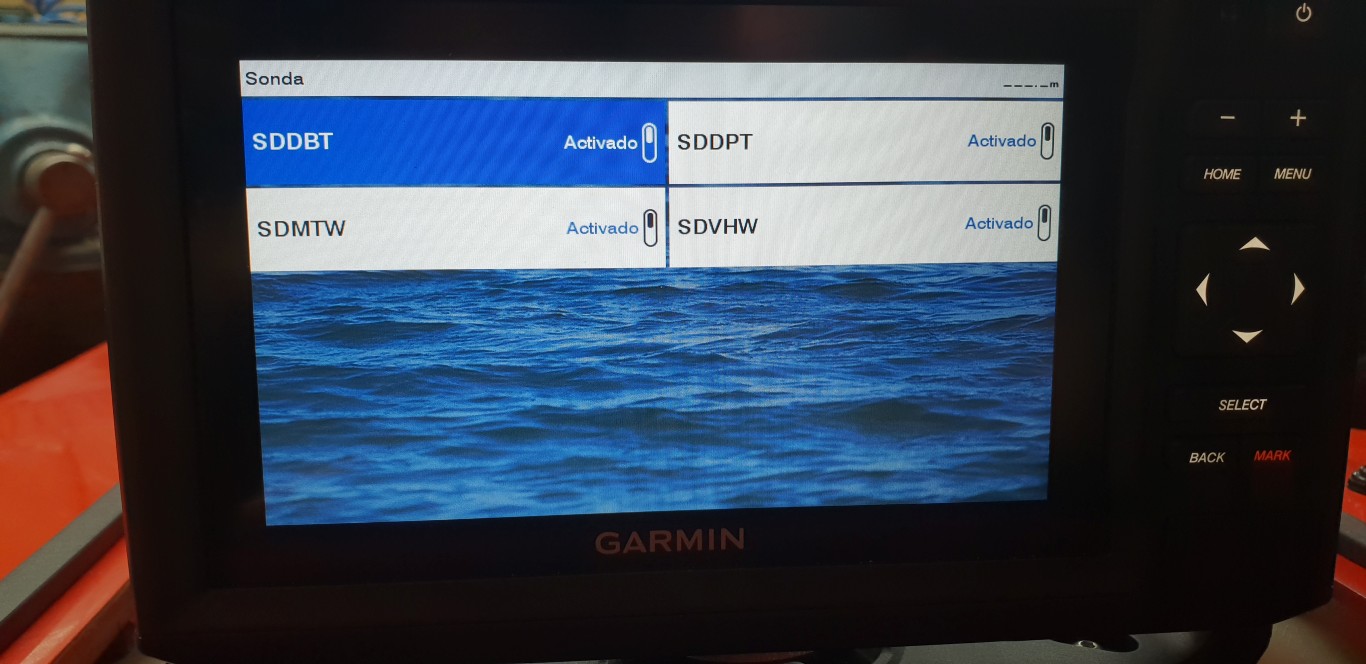
My Garmin echosounder nmea 0183 configuration have all options activated and works perfectly , deep distance in garmin and mission planner screen corresponds exactly.
1 Like
Hello all again ; The first few tests are going very well , but I see that the hull is moving with an S movement along the grid legs , stopping the here rtk inyection and starting the ntrip net , the courses are more paralell to the grid lines , but I don´t know if this effect is caused by the sensivity of the compass in excess or not gps accurate . any help are apreciated . Thanks
You may need a little tuning. Can you post a .bin log of the mission?
You may have answered my question in a New Topic I created today.
Now to wrap my head around how you did it.
Great job on the boat btw.
Не могли бы вы рассказать о подключении всех компонентов данной схемы. В частности интересно как правильно подключить выход эхолота через преобразователь к pixhawk и какие параметры вы применили в листе настроек планировщика миссий. Я сейчас тоже веду данный проект но у меня не получается связать pix 2.4.8 и garmin fishfinder c300 у которого тоже есть вывод данных по протоколу nmea0183
@I_think Did you ask yourself why everybody writes in english?
I’m sorry, I didn’t have time for my thought))
Are you from Russia?
Sorry . Could you tell me about the connection of all the components of this circuit. In particular, I’m interested in how to properly connect the output of the echo sounder through the transducer to the pixhawk and what parameters you applied in the mission planner settings sheet. I am also running this project now, but I can’t connect pix 2.4.8 and garmin fishfinder c300, which also has nmea0183 data output
Yes. I’m from Russia, but does this have anything to do with this project?))
Don’t know for others, for me it does, bye.