We used a simple global shutter USB Camera from leopard imaging (https://leopardimaging.com/product/usb30-cameras/usb30-camera-modules/li-usb30-m021/).
Also, worth looking at is the NanoPi Neo Air LTS (https://www.friendlyarm.com/index.php?route=product/product&product_id=151) as it supports CSI directly.
1 Like
Also, Jevois (http://www.jevois.org/) is another smart camera which works but is painful to work with.
1 Like
To me the Himax HM01B0 camera seems a very good option, gives 320×240 grayscale @ 60fps, is ultra low power (<4 mW) and very small / light (but has a rolling shutter).
2 Likes
Some consideration (free thinking):
- other then choosing the right camera and the right SBC they must be compatible both HW and SW (driver) - CSI vs USB vs ETH connection and driver (obvious)
- here we don’t have to consider the best option in absolute but constrained by the weight and size for ArduBee
- we can consider two solution: one with higher CPU specs (NanoPi variant or RPi3 Compute Module) plus global shutter camera; the other with lower CPU specs but with CNN acceleration (K210 or GAP8/PULP) plus tiny camera (HM01B0 or similar); this second solution is the one with lower power consumption, lower weight and size.
[Edit]
The second solution of the last point, as I said in a previous post, don’t consent us to do computational intensive applications such as Visual Odometry and SLAM but it could be used to make interesting experiments with convolutional neural networks, such as object detection and tracking and, as @guglie said, advanced navigation tasks using DroNet.
2 Likes
How much payload capacity is reasonable for camera + processing power?
1 Like
I would love to contribute with a video.
4 Likes
I think the sipeed products could be the right solution for this project.
The K210 is a powerful alternative to the current STM32 with CMSIS-NN products. I have worked with OpenMV which are powered by F7 and H7 and are less performant than K210.
Here an academic paper comparing the machine vision options available.
The biggest actual limitation to the K210 is the ram size (8MB), but this could be exploited via adding more PSRAM. The K210 can also be overclocked to 800MHz which gives the possibility of VGA at 60 fps.
Someone has already tried to implement a NN for drone autonomous flying by using Mobilenet Classifier here for INAV.
Moreover, I think that it could be possible to port DroNet for this micro and I will try to do so.
Also consider the Audio and FFT accelerator, this could enable predictive failure detection, by listening to the motors and propellers sounds.
4 Likes
I would say over the K210, NanoPi+Coral USB is much more powerful and more usable at a cost of about 10g more weight.
3 Likes
I am testing RPi4 + Coral USB with TensorFlow Lite (obviously), it is a really powerful pair. For now tested only on ready model for object detection with mobilenet_ssd_v2 and pose estimation with PoseNet.
For object detection I see 20ms per inference with Coral and 250ms per inference without Coral.
Here a little video of the output PoseNet:
2 Likes
Anyway for dimension, weight and power consumption, boards based on K210 are winner IMHO.
I have one of this in my hand, I don’t think is more the 5 grams (I don’t have a precision balance) and power consumption max 1W (10$ included the camera).
I was able to run the DroNet model on the above linked board. I Had to convert from the original Keras model to TensorFlow then to TF Lite then to kmodel (for K210) and I obtained a model working at 0.9fps, but I think there is large space to optimizations.
4 Likes
Anyway as stated above
Higher specs solution could be based on he NanoPi Neo Core 2 with optionally an accelerator as Coral USB or Intel NCS2 and a global shutter camera.
Lower specs solution based on … I think you know what.
2 Likes
I waited for the SKYVIPER 2450 GPS to be supported in Japan.
But this plane was not released for Japan.
I expect this aircraft.
I would like to be able to replace the WIFI device on this aircraft with a Japan-certified device so I can fly it immediately.
In Japan, GITEKI is required for devices transmitting radio waves.
There are ESP8266 compatible GITEKI devices in Japan.
2 Likes
@anbello Our work might interest you: https://arxiv.org/abs/2006.06753
2 Likes
Thanks a lot @firenitin really interesting, I have to read it more in depth to understand what is the minimal HW requirement to test your deep learning approach to VIO and I would like to know if it is open source.
1 Like
We’ll make the code open-source soon (say a few months, once our paper is accepted).
3 Likes
After months full of days dedicated to improving the ArduBee platform, we are happy to show you the following result.
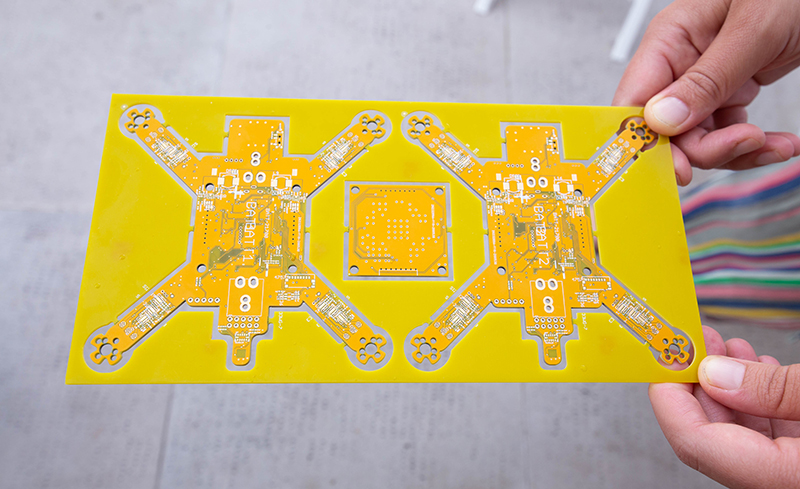
This is the last arrived fresh pcb ready to be assembled, in the center there is the GPS module and you can see two ArduBee on the sides. One is the original with F4 mcu, in the other one we successfully integrated the new mcu, the talented H743 with 2Mb Flash RAM.
The UWB module, the Gps module and the 9 range finder addon are ready. You can see the Gps module on top of the ardubee frame and also the avoidance board with 8 horizontal range finder plus a vertical one looking to the top.
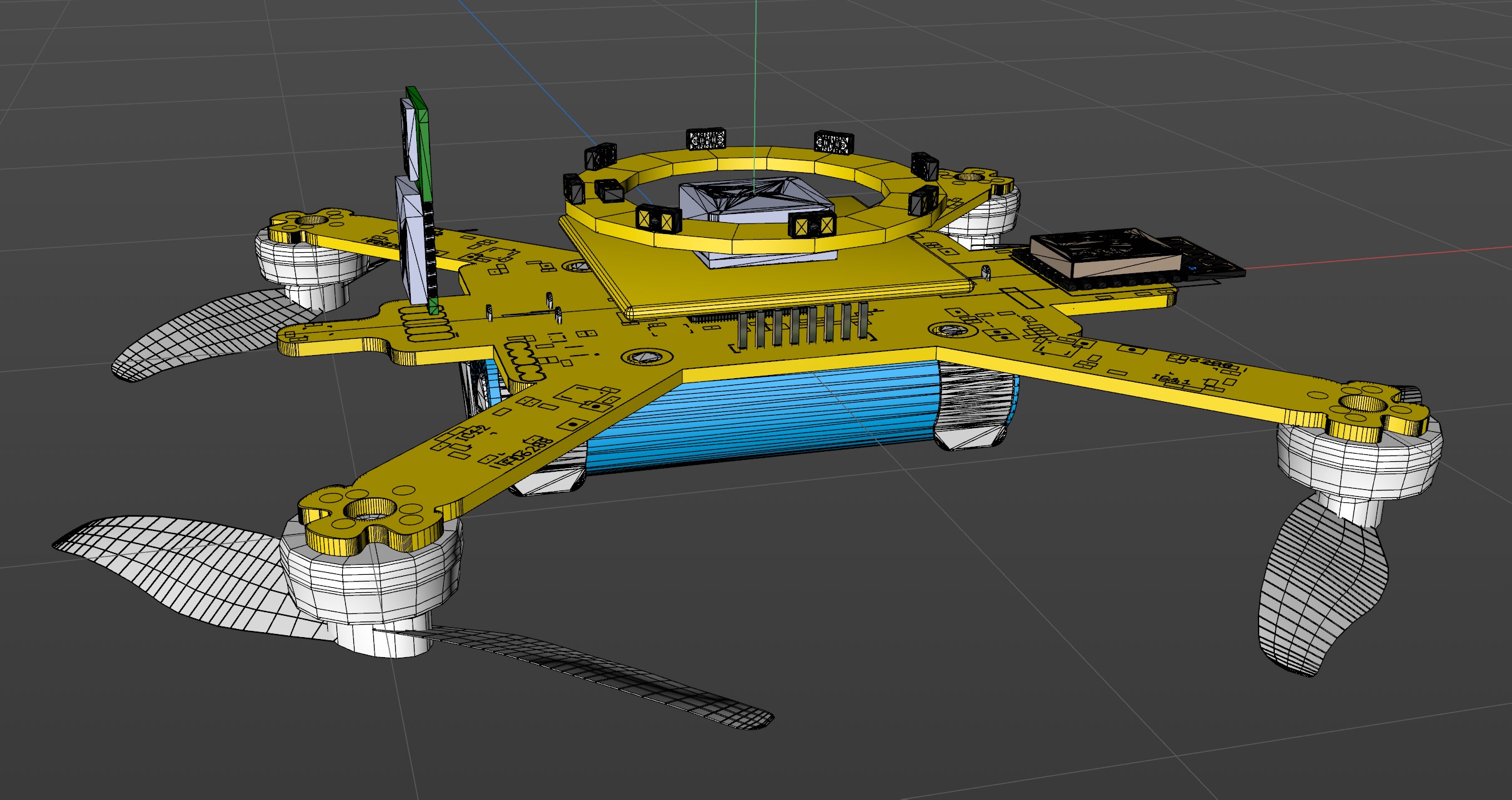
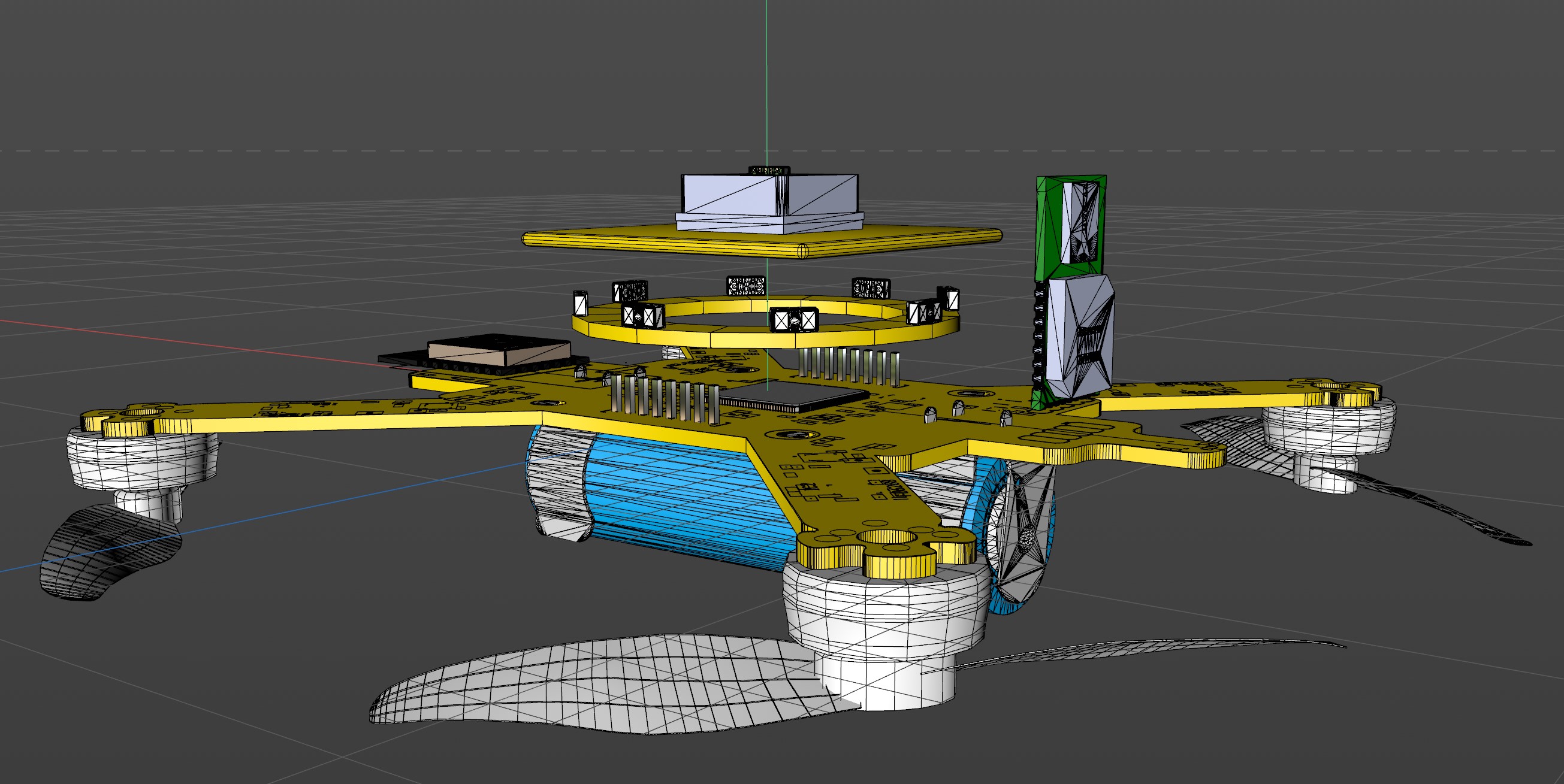
We are also excited to reveal we are close to finishing a new element we believe will be so usefull to complete ArduBee! We’ll presents the calculations, simulations involved in the complex engineering process behind it soon. In the meanwhile we want to share this last picture of it 
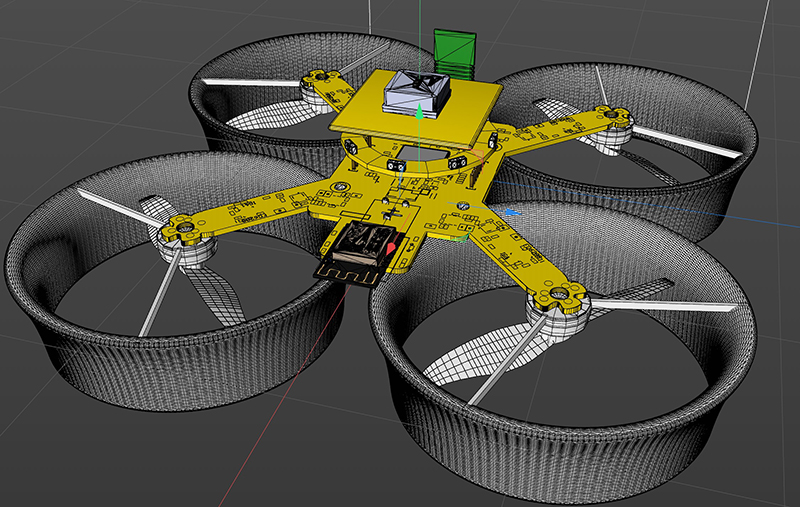
13 Likes
Wow that is auwsome,great work Giorgio and the team cant wait for it to be released
2 Likes
Awesome! This project only better Giorgio!
2 Likes
I want the communication modules to be interchangeable.
I can’t replace the communication module when it’s attached to the board.
I live in Japan and have to use devices authorized in Japan.
1 Like
I prefer ESP-WROOM-02 (with GITEKI certification) as a WIFI device.
Example(Buyer).
https://www.switch-science.com/catalog/2346 /
I would like to have OpticalFlow and RangeFinder, as Japan flies indoors a lot.
I think the following would be a good choice
OpticalFlow: Thone-Flow-3901U
Rangefinder: VL53L1X
I’m an engineer, so I want a couple of cars at most. I am a hobbyist, so I don’t have a lot of money.
In Japan, there is no ArduPilot fuselage that can be flown by ordinary people without modification.
SKYVIPER 2450 GPS could not fly because it does not have the GITEKI of Japan for both WIFI communication and propo communication.
I feel that with the ArduBee, more people in Japan will be able to enjoy the Ardu Pilot.
1 Like