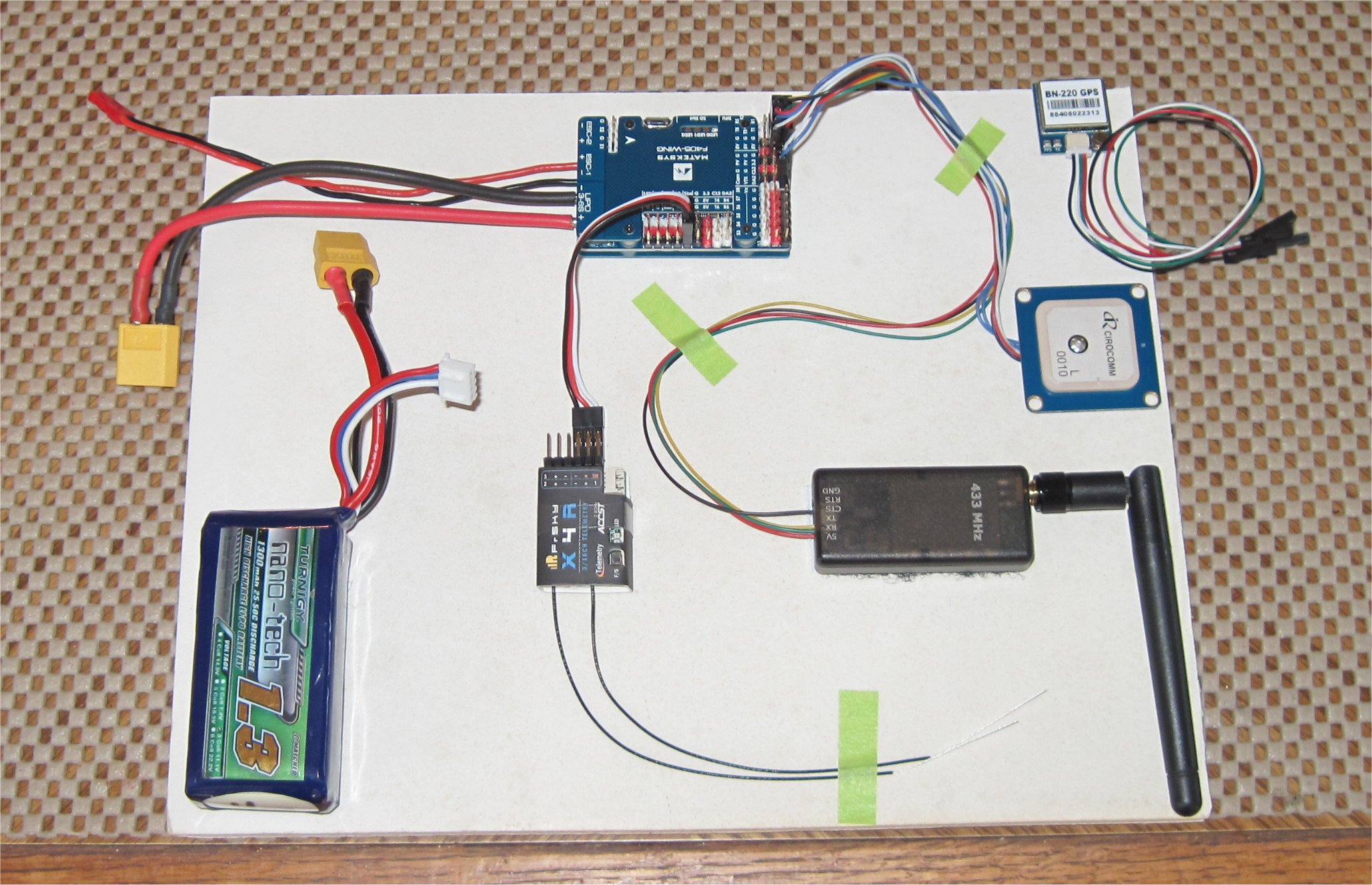
Hello all! New here, building my first Ardu rig and it’s a VTOL. So I’ve done a ton of reading and one thing I have yet to see is anything on arming? Can anyone point me in the right direction. I’m using an F405 wing. When I power up to do some of the setup I’m get all sorts of servo activity as I’m in Qstable. Thanks!
Hi Michael,
Arming a VTOL is no different than arming a copter or plane. Check out the Wiki section below.
Cheers!
Ok, Thanks. Actually finding Ardu very frustrating coming from Inav. I realize there will be a learning curve but for example. After visiting the link I want to arm via a switch. When I search for RCx_OPTION noting comes up. Not to mention I have all my switches setup but only one shows movement in the radio calibration page…uggg.
Going from Inav to a VTOL using ArduPilot is quite a leap in capability. I would recommend a smaller jump to a copter or plane or both first. A VTOL would then be a mix of both projects. You might have a more successful experience.
Good luck!
Hey Greg did you run into any issues getting the compass to work on the f405? Using your Param as a guide setting up my f405 and can not get the compass to show.
No, not that I recall. As you can see, my setup was pretty straight forward and I copied the WiKi information from here. Make sure that the SDA and SCL lines are not swapped. For the I2C compass, connect SCL to SCL and SDA to SDA. For serial connections like GPS and Telemetry, cross Tx. to Rx. and visa-versa.
Try loading an older version firmware to make sure it isn’t something new that has been introduced. Something like a v3.9.10 that we know works.
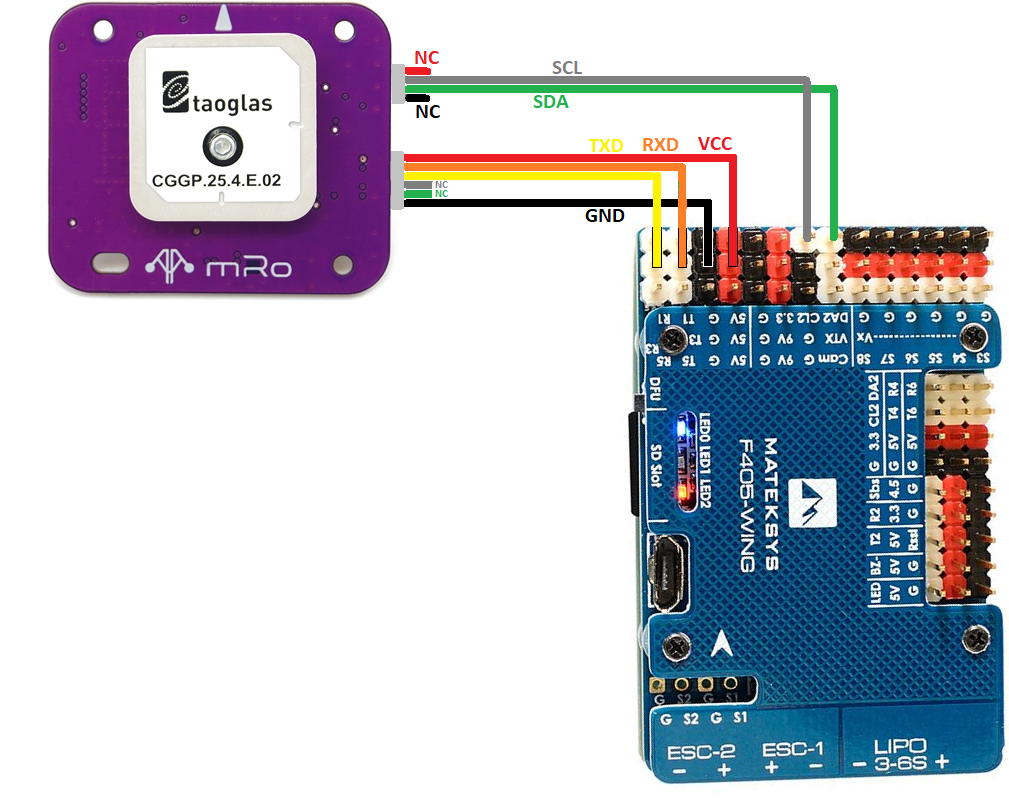
The only thing I have done different is connected to the CL DA pads over on the sbus side of the board. I have metered them and they are shared with the ones you used. I can try older firmware but it is difficult due to my boot button falling off.