Hi
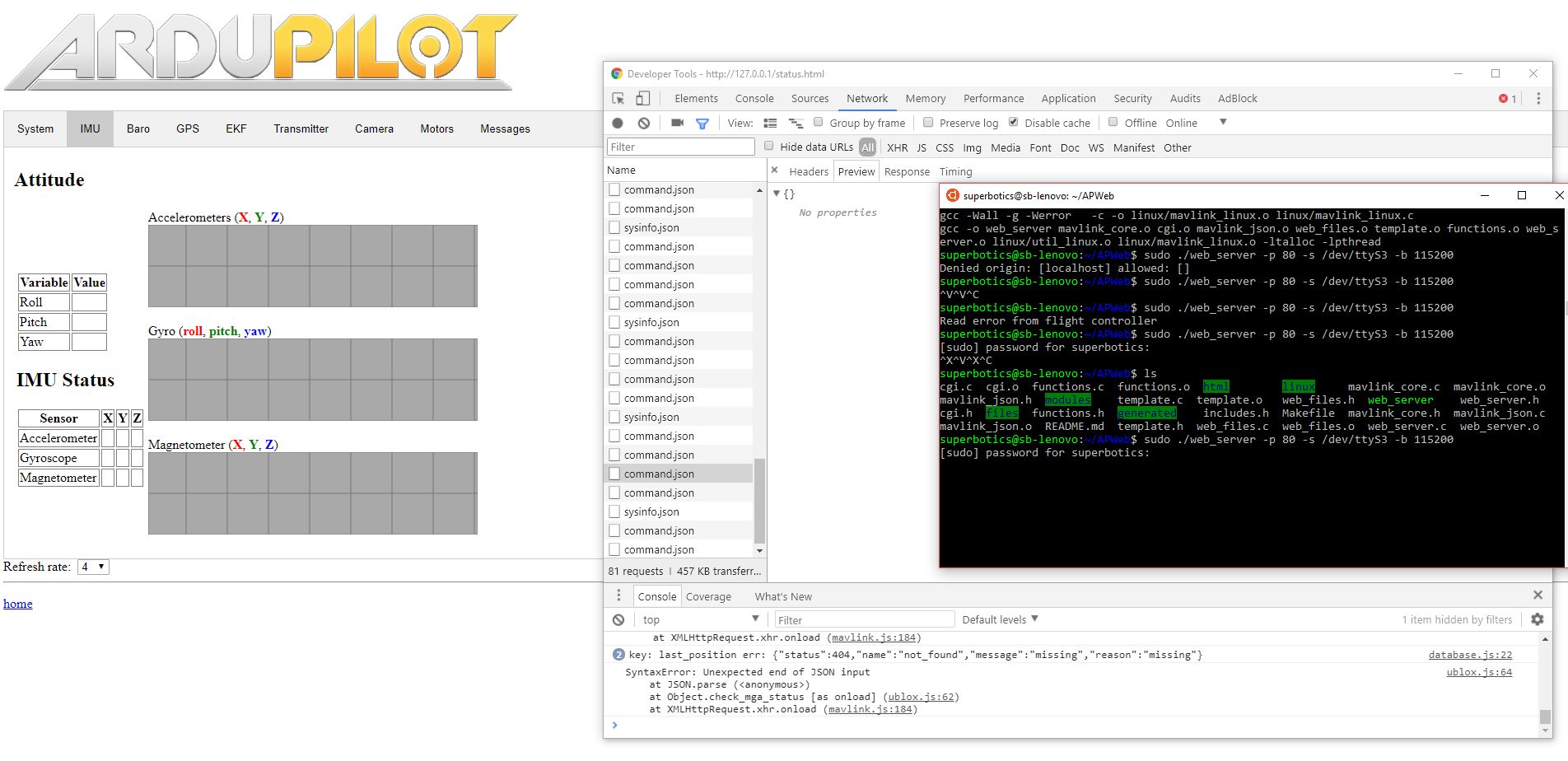
I tried building this https://github.com/ArduPilot/APWeb in Ubuntu xenial running in WSL (windows sub system of linux windows 10 ) successfully.
its runs without error with below command
Hi Peterbarker,
Thanks for a quick reply. Also you have put in lot of efforts into that branch.
I tried using your branch now. One thing I noted was returning response.
baud rates are ok as it works with the same with pymavlink, mission planner and q ground control.
Good stuff.
Also I tried some debugging with some printf and I found code is not crossing this line
I assume, then the read() call is returning bytes?
The line you’ve highlighted will return true if a packet has been found in
the input stream. Pretty much the only thing that could be wrong in that
case would be a serial settings mismatch - perhaps we’re not setting the
serial port up correctly.
Can you run “stty </dev/ttyS3” after (successfully) running MAVProxy on
the port, and again after (presumably unsuccessfully…) running APWeb on
the port, please?