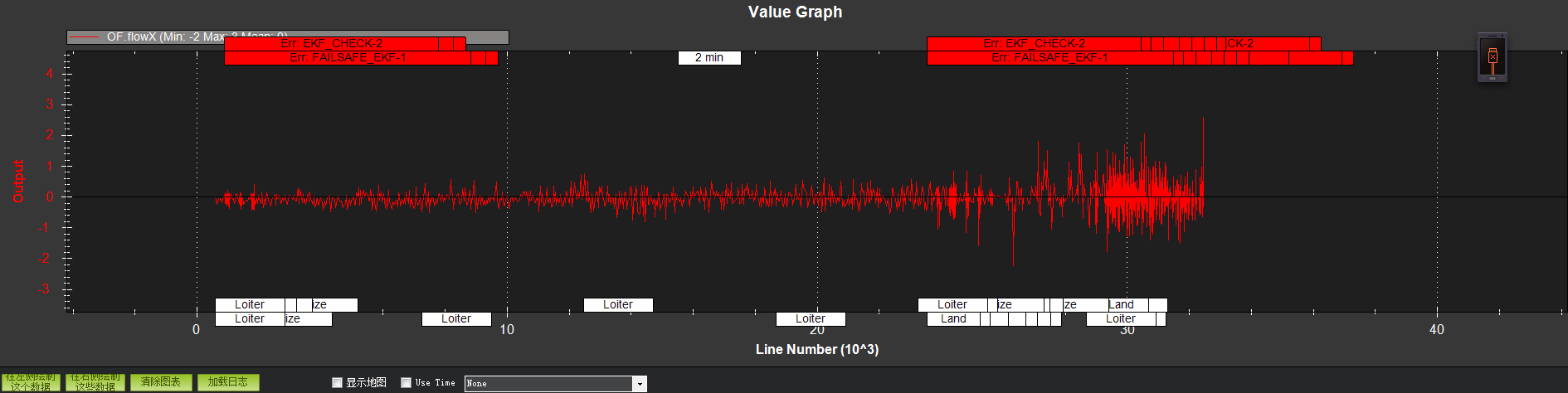
I use PIXHAWK burned with APM3.3.3 firmware to test the official PX4 flow sensor, (supported by http://ardupilot.org/copter/docs/common-px4flow-overview.html). Now,I can see the optflowdata in the MP(version1.3.38) status section ,then I change the EKF_GPS_TYPE from “0” (default )to"3"(use flowdata).When I were arming the copter in loier mode ,there happens the MP warning “EKF variance” ,meanwhile the APM change to land mode automatically. And If I set the parameter EKF_GPS_TYPE back to “0”,there is no such problem.
Anyone who knows the reason! TKS !