I have a autopilot APM2.8 board, I tried to upload the firmware AC V4.x.x it uploaded and verified but it doesn’t work. I checked the documentation, mentioned AC V3.2.1 is the latest version supported by APM2.8 and I installed AC V3.2.1 it doesn’t work again impossible to arm, impossible to calibrate and no error .Finally, I installed MP V1.3.82 and uploaded AC4.xx, it uploaded AC3.2.1 automatically and can’t calibrate again. I installed another MP V1.3.45, this version can’t upload any firmware but I could calibrate the board, accel and compass calibration are successfully with AC V3.2.1 uploaded in.
The results are not good, the drone is not stabilised at all, difficult to pilote…
I saw many YouTube videos who used MP V1.3.60 + and uploaded V4.xx AC to APM2.8 , how it’s possible and which real version of AC and MP are ideal to APM2.8??
Thank you
Now it seems difficult to upload the firmware, I used AP 1.3.48. 2015 , It uploaded AC V3.2.1 automatically and successfully but impossible to arm. I tried to upload custom firmware(arducopter.Hex) but communication error & no connection but COM19 is really connected…
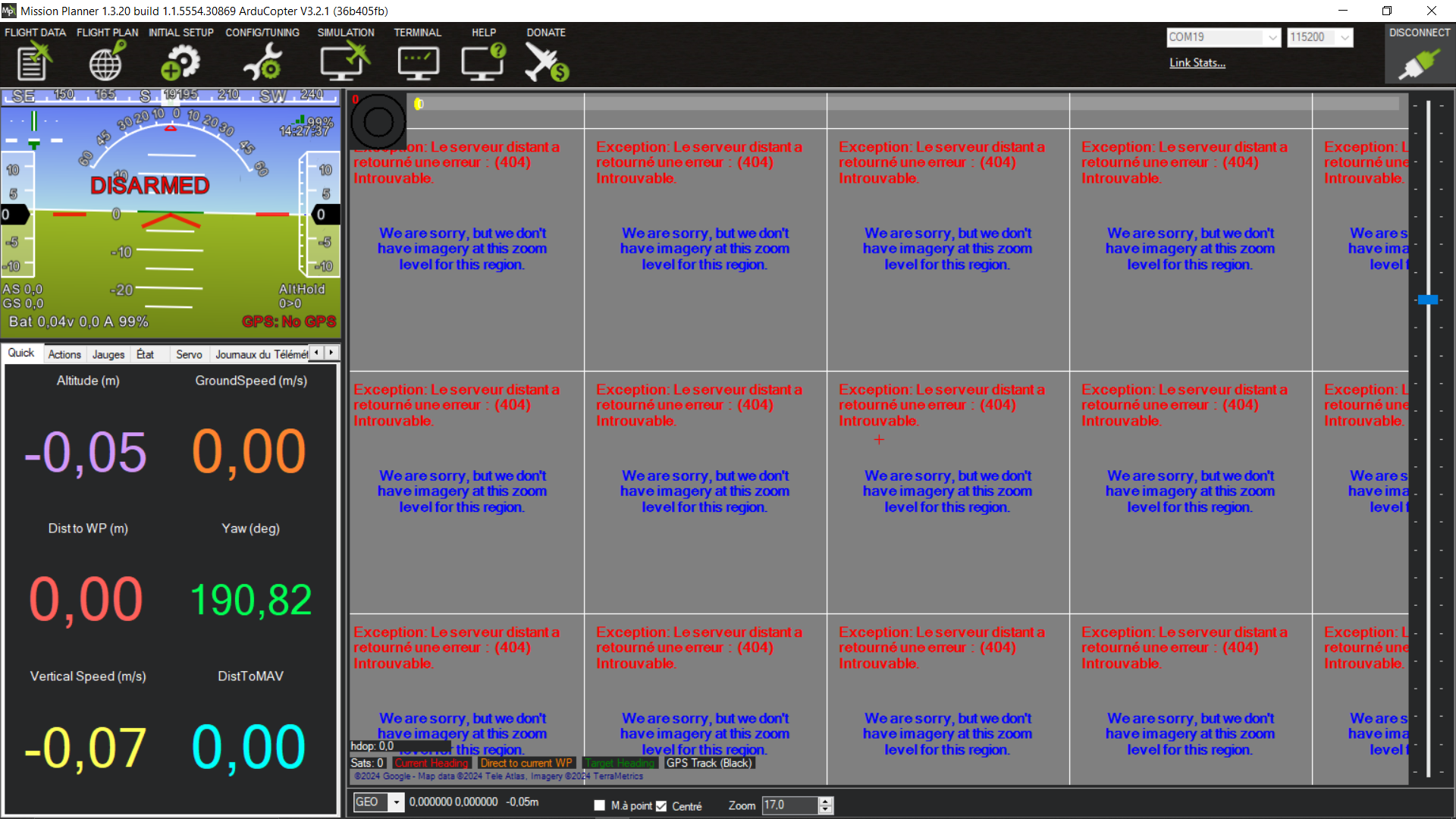
look at these screenshots MP1.3.20 2015, There is no firmware in it, I tried to upload the firmware manually(downloaded from ardupilot.org - arducopter.hex V3.2.1 )AND the result is board detection error, but it can be connected via mavlink to view the parameters dashboard. I’m connected to Internet… Bizarre, I’m out of options🤦
You will be better off getting a supported flight controller. The investment should return itself within one month if you get something like SpeedyBee F405. Just look through Hardware To Avoid When Building Your First Multirotor and actually avoid it.
Thanks for your help, I could fix the error and upload the firmware AC3.2.1, calibration successfully, the drone can take off but the flight is not really stable, sometimes take off failed and dropped… How to configure that to have more flight stability, I saw the tunning config but I did some config but still not stable.
Some ideas to set that issues,
Not much today in the way of tuning guidance carries back to that old level of firmware and further there are very few people around that remember how to tune an APM. On the plus side there are very few parameters to play around with compared to what we have today. Get a new Flight Controller.
But, digging up an old parameters file from the 3.2.1 days these are what you have to work with:
RATE_PIT_D,0.004
RATE_PIT_I,0.1
RATE_PIT_P,0.13
RATE_RLL_D,0.004
RATE_RLL_I,0.1
RATE_RLL_P,0.13
RATE_YAW_D,0
RATE_YAW_I,0.02
RATE_YAW_P,0.15
Or just try Auto Tune. I thought that performed poorly back then but what else do you have?
That’s all I ever tried (8-10") and was never happy with it and always manually tuned. When you only have a few parameters to work with there isn’t much to it. I didn’t build a small craft until the Omni Nano board was supported and by that time manual tuning was all I did. Still do.
yea it it gets you in the ballpark but it usually requires some manual tweaking afterward,Usually dialing down the P gain little as it would be very twitchy.
Thank you all. I could set up something now, but one thing again, I used a lora wifi UART(AR1021x) for telemetry, it’s an Atheros chip…
Some idea how to use this for ardupilot?
what I tried:
I connect Ardupilot to raspberry pi and the WiFi Module connected to raspberry via USB, I couldn’t do anything well. This module has an UART protocol