Hello everyone,
I love the APM planner for reviewing logs, it is very clear and the plots look very organized. However, it seems that it is not very suitable for plotting variables when the log was collected using Arducopter 4.1. It plots the information of multiple lanes in the same plot which gives the impression that you have a lot of noise in the states of the Kalman filter. For example:
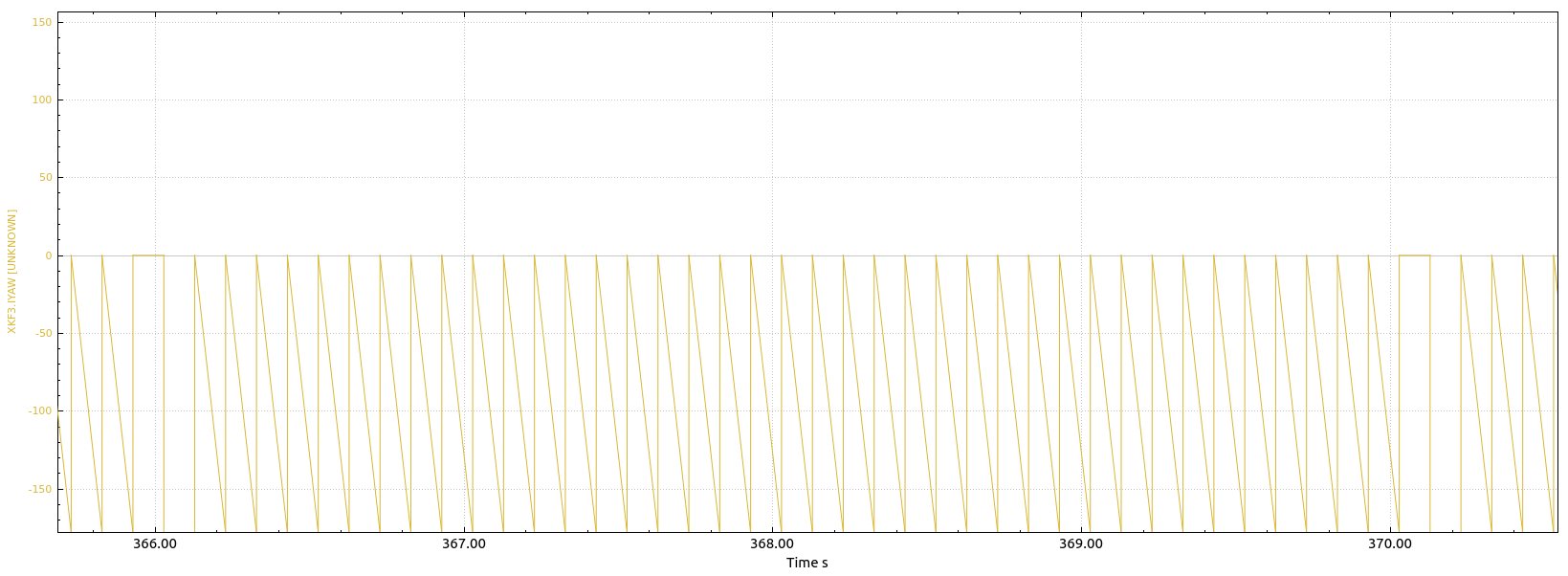
It is because it does not allow you to select only one instance for the plot but automatically tries to plot both in the same instance.