Having Issues with my apm 450 quad in loiter and auto modes. It seems like it is either over correcting or the GPS / Baro is moving around and giving off inaccurate readings. I have a video to show what it looks like and I have tried a few different things with no luck. It flies pretty much perfect in stabilize mode.
-Tried Calibrating Compass (At Least 4 Times)
-Tried Auto Tuning The Quadcopter
-Tried Calibrating Accelerometer / Level
-Made Sure That Correct Compass Is Being Used
-Getting 10-12 Sats Inside Of House
-Added Foam To Baro Inside APM 2.8
Set Up:
-APM 2.8
-F450 Frame
-SunnySky 980kv Motors
-4in1 ESC
-Beitan GPS
I would really appreciate if anyone could make some suggestions. Thanks,
(Sorry for the crappy video  )
)
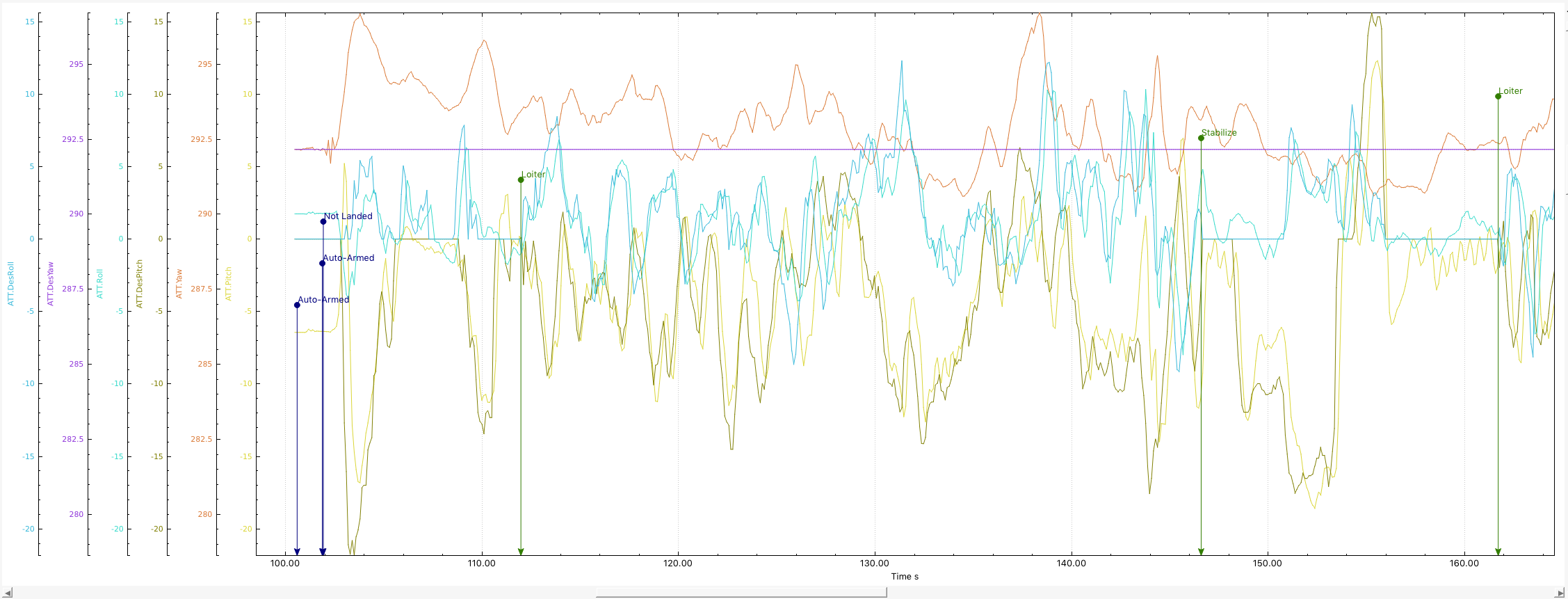
Edit: In the video, I took the quadcopter off in stabilize and switched it to loiter. It had been on for a minute or two beforehand so should have a good GPS lock. I left the controls completely still while it was in loiter and then landed in stabilize at the end. I am also not sure if the log provided is the same as in the video but it should still show the issue.
Log.zip (94.7 KB)