Px4, 3DR Quad, many prior flights: APM 3.4 PX4v2
My battery was getting low, running in stabilized mode, so I decide to land my 3DR Quad.
I get 1 foot above the ground, I hear the Low Battery Alert - AutoLand message.
I quickly lowered the throttle to zero, BUT it won’t land. No throttle up or down, it drifts about a foot, lands and tips to one side- minor prop damage. Then I hear the Crash message.
I’ve had this quad higher when Low Battery Alert - AutoLand kicks in, and it decends slowly - with “sloppy” input from the throttle.
I’m guessing there is a timing thing, when AutoLand kicks in. Any ideas?
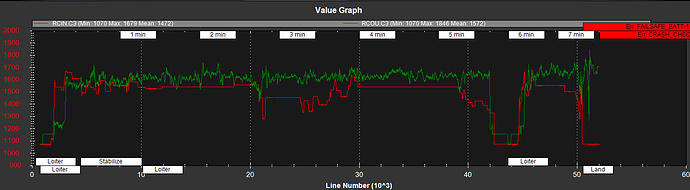
Here is RC3IN in red, RC3OUT in green. HDOOP 1.3, 9 sats.
I was deliberately running down this battery, it was ready to be recycled. I landed at 4:30 and still had some voltage left, so hovered a few feet off the ground for a minute, alarm went off, cut throttle tried to land, but it just hovered then slowly drifted 3 ’ and landed, tipped to the side w/props turning, got crash alarm.