I get the board powered as well as receiver and even bind but the receiver doesn’t seem to hear my transmitter. I don’t know what to do. I will gather more info on my build and post if this gets any attention.


Hi, I’m not an expert. Posting some photos of your connections will help someone to troubleshoot.
I am using a FS - T6 with FS - R6B receiver. I can’t get past radio calibration on Mission Planner, I get no response in the displays on the application even though I am paired to my receiver with solid LED.

Is the Bind Plug still connected to the reciever ? If so remove it after binding, and try calibration .
Is it an APM2.8, ? . If so, the compass wires need to be connected to the port under the GPS port.
Is the Bind Plug still connected to the reciever ? If so remove it after binding, and try calibration .
Is it an APM2.8, ? . If so, the compass wires need to be connected to the port under the GPS port.
So 2 pin plug doesn’t go in I2C. One into GPS and the other in the one on immediate side of GPS?
I do believe it is APM 2.8. Whichever would be the version that’s retired and only applicable up to firmware version 3.2.1 i do remove bind plug each time
If APM2.8, the compass goes to the port near the gps, and there is a Jumper near the GPS port, which you have to remove, to disable the internal compass.
By directly connecting an esc signal wire to ch 3 of the receiver, power the esc, you can test if it is recieving signals.(remove PROPs). Read about one by one ESC calibration.
Okay, plucked the jumper and i’ll test the receiver asap. If it ends up being a faulty receiver what other compatible receiver would you recommend ??
As I haven’t used that radio, sorry, I can’t help you there. But a google search will do!
If you are seriously into the hobby, consider another good quality radio.
Do you know if APM is PPM only inputs or will it naturally accept all PWM inputs… I’m gonna be pissed if I have to go with a whole new radio system after picking this one up. Maybe a PWM to CPPM encoder is the way, that is if my receiver is even good. So plugging my ESC BEC straight into receiver can tell me if it is working or is there something flying over my head here.
It will accept PWM.
Connect signal pin (BEC) to channel 3 of reciever, give throttle, it should work.
What do you mean by signal pin exactly just to make sure. Because it is a 3 pin plug
Hi, sorry for confusing you…!
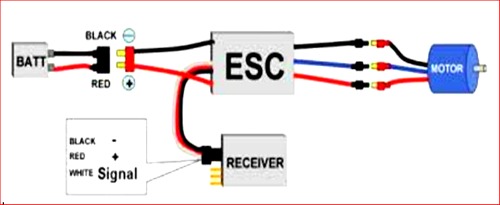
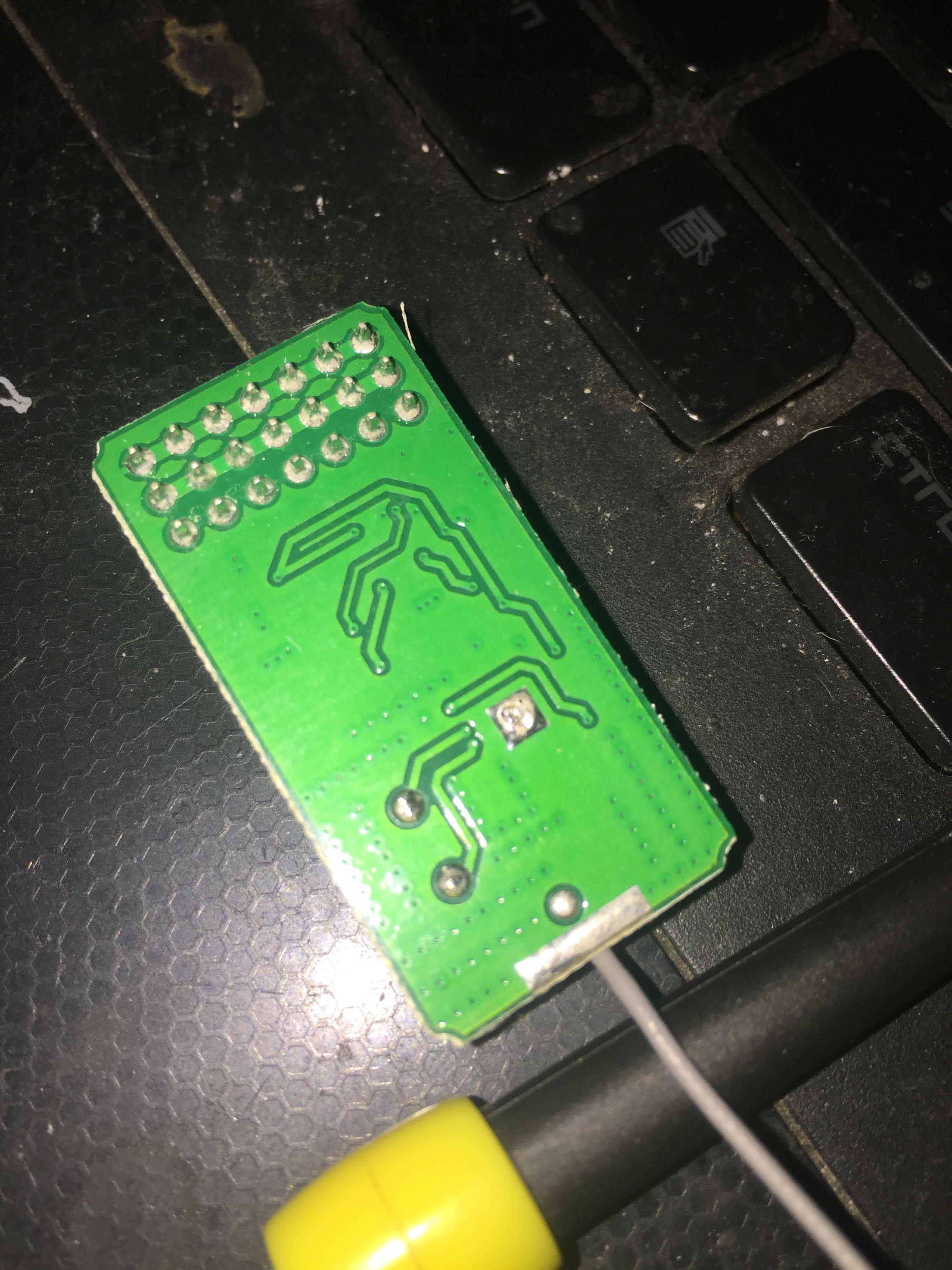
No worries, you didn’t. So I did exactly that in the diagram with no luck before. I decided to examine the receiver boards circuits and solder points. Does that look like a faulty point to you there with the crater in it? (Sorry little blurry) So I soldered it and am now getting a response from motors when I go about the above diagram. Now may be time to look into that one at a time calibration you mentioned. Then I’ll see if I am getting a response in the mission planner radio display here ina bit.
IMHO the radio is crap, but that is not causing your troubles.
#1 on the list is the pictures show the bind plug is still plugged into the BAT/Bind port on the receiver. As long as that plug is there the receiver won’t do diddley.
The bind plug in the photo is still on there only so I don’t lose it. I wasn’t working on it at the time so when i grabbed it to take some photos it remained. Anytime I try to tinker with it I am sure to remove it after binding. Honestly I do regret getting this radio and not the I6 instead.
I really appreciate the help. I finally got radio calibration and can arm and fire up the drone, just need to get it dialed in and flying smoothly. Can someone suggest a good battery to run on this system because I think my 11.1v 2200mah is a bit inadequate.
I’m not sure what frame you are using, so I’ll assume its a 450 quad, and that is going to limit which motors and props you can use, but you’re pretty much stuck using 3S. I used some 3S 3000mAh packs on a similarly powered quad, so you might give one a shot.
To run 4S you will need to change to lower Kv motors and props longer than 10", and I don’t see that happening…
With this 2200mah battery I cant seem to take off. I can just rev the throttle, roll, pitch and yaw are all responsive and function seemingly correct it just seems like its too heavy for some reason which i doubt because i have no equipment extra whatsoever onboard the drone. Only the bare necessities for flying. Im probably going to be going for a 3s 5000mah soon. Motors are 920kv with 1045 props. It is a 450 quad.
APMs running AC3.2.1 have this odd habit of limiting maximum throttle to 8%.
Connect the APM to Mission Planner. After the parameters finish downloading, click “Config/Tuning,” Click “Full Parameter List.” In the search box on the right type THR_MAX. Set the value to 1000 (this is 100% throttle), and click Write Params.