I am having some serious problem . I am using apm2.8 fc flyskyi6x tx for my try copter . The fact is that the radio calliberation is being such a pain for me . It is just not being calliberated , I have put my output signal to pwm , when I go to calliberated radio controller only the throttle and the roll moves . None of the other yaw and pitch moves even a little bit . I have tried going into full parameter list but I cannot find any of the required parameters such as rcn_function or servon_function . That’s why I cannot load or save or manually write them …besides there is no frame choose option in the full parameter list . Please help me anyone . Drop your WhatsApp number so that I can get into your touch . As a matter of fact that I have to present the project withing 1 week. I am in a very tough position . Please help me .

I think some more details are needed
Which FC firmware version you are using?
Which MissonPlanner version you are using?
Which RC receiver you are using?
How you connected the RC receiver to the FC?
APM 2.8 is no longer supported. You need MP from 2015 to deal with it.
I would strongly recommend getting a modern supported flight controller.
FC version : arducopter3.2.1 ( it is said to be suitable for my tricopter )
Mission Planner version : 1.3.64(tried on the latest 1.3.9 version , same isues )
TX : flysky i 6x
RX : FS - IA10B
connection : Connected all the pins ( signal , GND , live ) with FC input 1 all three pins
then the channel 2 - 4 pin to the FC input 2 - 4 pins
would pixhawk serve the purpose ??
Many flight controllers would.
Supported Flight Controllers
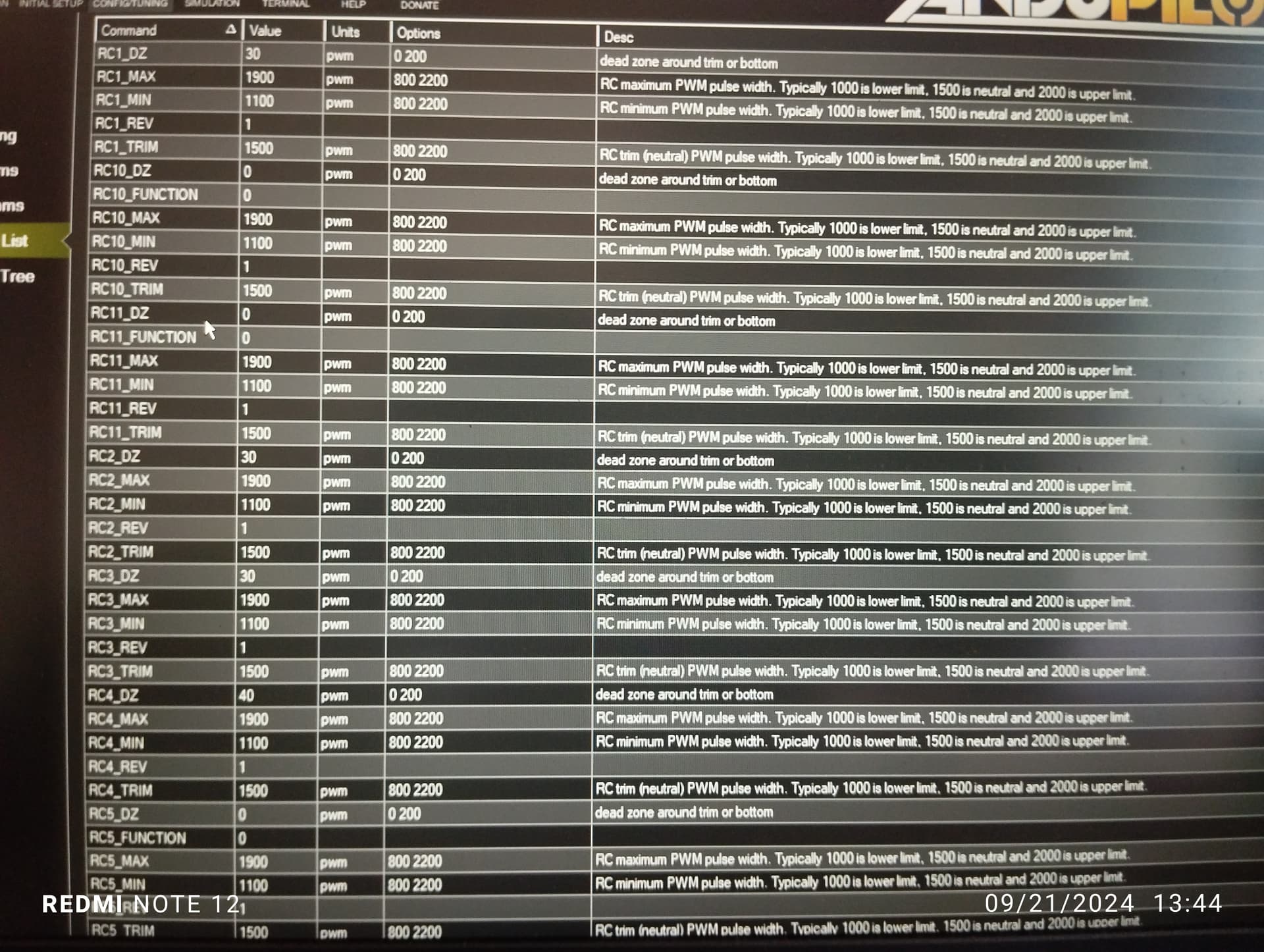
Maybe you also can show your complete PARAM file and some other can check this. I don’t have old missionplanner version.
Can you check your RC receiver outputs with direct connected servos?
Why you don’t use the PPM SUM signale mode? The receiver and I think also the APM2.8 support this.
They do support PPM. You have to jump a couple pins on the input header.
It’s shown here in the ancient archives PPM with relic APM
I tried to use ppm . But it worsens the situation and the result is , only the roll works. The other three throttle , pitch and yaw are frozen .
Did you can check the RC Receiver outputs directly without FC to be sure that this is working ok?
Did you used the “jumper” between the signal pins of input 2 and 3 on the FC during PPM test?
Show your PARAMs file.