apm 2.8 with fw 3.2.1
ublox gps with mag
power from power module
900mhz telemetry radio
spektrum dx6 g2 radio
S500 frame ( dji flamewheel )
3s 3000 mah lipo battery
2212 920kv motors
30A esc with simonk firmware
here is my problem:
after assembling the quad it try’s to stabilize at a 20 Degree Bank angle ( flying to the right quite quickly.)
i could hold it in a hover but it took most of the roll input i could give it from the radio.
i have read the guides and searched the fourms and have not found any thing helpfull.
Could you do another flight with increased logging levels?
RCout, mag, or just the lot.
Not a lot to go in that log file.
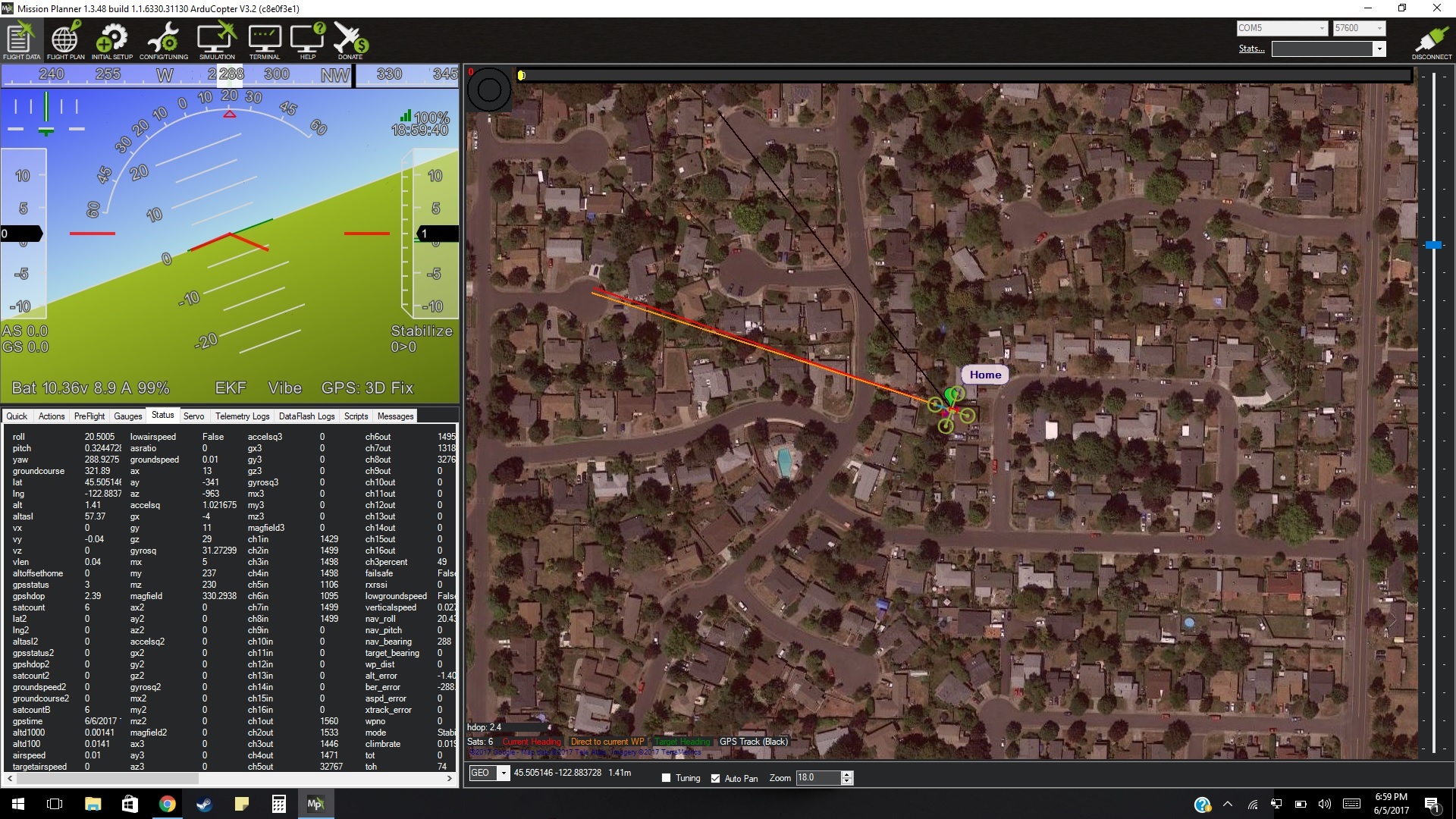
A screen shot of the HUD in Mission Planner?
From what your saying, the HUD should show a 20deg lean to the left.
Is that correct?
Doing an Accel calibration should fix that, multi axis or even just the single level calibration should fix it.
Unless something is wrong with your controller.
Where did the APM2.8 come from?
IS it an APM clone or a Pixhawk clone?
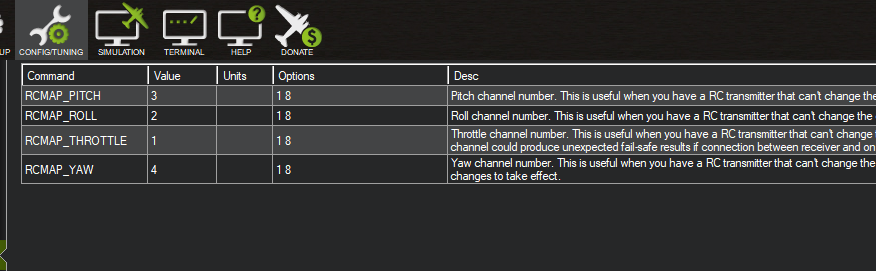
Your Aileron (roll) trim if it’s on chan 1 (RC1_TRIM) is suspect. Did you perform a radio calibration?
These APM 2.8 clones all seem to work well in my experience. I have used and retired (move to Pixhawk) several of them from different sources and they all worked fine.